Variedade (matemática)
Na matemática, uma variedade é um espaço topológico que se assemelha localmente ao espaço euclidiano perto de cada ponto. Mais precisamente, uma variedade de dimensão n, ou simplesmente n-variedade, é um espaço topológico com a propriedade de que cada ponto possui uma vizinhança que é homeomorfa a um subconjunto aberto do espaço euclidiano de dimensão n.
Variedades unidimensionais incluem retas e círculos, mas não curvas que se autointerceptam, como uma figura de oito. Variedades bidimensionais também são chamadas de superfícies. Exemplos incluem o plano, a esfera e o toro, e também a garrafa de Klein e o plano projetivo real.
O conceito de uma variedade é central para muitas partes da geometria e da física matemática moderna porque permite que estruturas complicadas sejam descritas em termos de propriedades topológicas bem compreendidas de espaços mais simples. Variedades surgem naturalmente como conjuntos de soluções de sistemas de equações e como gráficos de funções. O conceito tem aplicações em computação gráfica dada a necessidade de associar imagens a coordenadas (por exemplo, em tomografias computadorizadas).
Variedades podem ser equipadas com estrutura adicional. Uma classe importante de variedades são as variedades diferenciáveis; sua estrutura diferenciável permite que o cálculo seja realizado. Uma métrica riemanniana em uma variedade permite que distâncias e ângulos sejam medidos. Variedades simpléticas servem como os espaços de fase no formalismo hamiltoniano da mecânica clássica, enquanto as variedades lorentzianas quadridimensionais modelam o espaço-tempo na relatividade geral.
O estudo das variedades requer conhecimento prático de cálculo e topologia.
Exemplos motivadores
Círculo
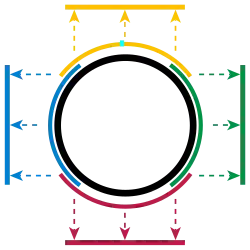
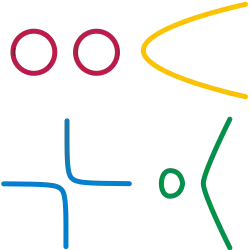
Depois de uma reta, um círculo é o exemplo mais simples de variedade topológica. A topologia ignora curvaturas, portanto um pequeno pedaço de um círculo é tratado da mesma forma que um pequeno pedaço de uma reta. Considerando, por exemplo, a parte superior do círculo unitário, x2 + y2 = 1, onde a coordenada y é positiva (indicada pelo arco amarelo na Figura 1). Qualquer ponto desse arco pode ser descrito de forma única por sua coordenada x. Assim, a projeção sobre a primeira coordenada é um mapeamento contínuo e invertível do arco superior para o intervalo aberto (−1, 1):

Tais funções, juntamente com as regiões abertas que mapeiam, são chamadas de cartogramas. De forma semelhante, existem cartogramas para as partes inferior (vermelho), esquerda (azul) e direita (verde) do círculo:

Juntas, essas partes cobrem o círculo inteiro, e os quatro cartogramas formam um atlas para o círculo.
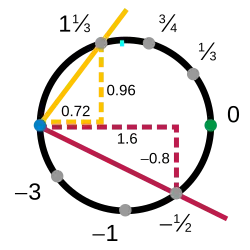
Os cartogramas do topo e da direita, e respectivamente, se sobrepõem em seus domínios: sua interseção está no quarto do círculo onde tanto as coordenadas quanto são positivas. Ambos mapeiam essa parte para o intervalo , embora de formas diferentes. Assim, pode-se construir uma função , que toma valores do contradomínio de de volta ao círculo usando a inversa, seguida de de volta ao intervalo. Se a é qualquer número em , então:






![{\displaystyle {\begin{aligned}T(a)&=\chi _{\mathrm {direita} }\left(\chi _{\mathrm {topo} }^{-1}\left[a\right]\right)\\&=\chi _{\mathrm {direita} }\left(a,{\sqrt {1-a^{2}}}\right)\\&={\sqrt {1-a^{2}}}\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/aac2a37b60a9ce8f0b9cfbc0f08ed98782b240c8.svg)
Tal função é chamada de mapa de transição.
Os cartogramas do topo, inferior, esquerda e direita não formam o único atlas possível. Os cartogramas não precisam ser projeções geométricas, e o número de cartogramas é uma questão de escolha. Considere os cartogramas e


Aqui s é a inclinação da reta que passa pelo ponto de coordenadas (x, y) e pelo ponto pivô fixo (−1, 0); de forma análoga, t é o oposto da inclinação da reta que passa pelos pontos de coordenadas (x, y) e (+1, 0). O mapeamento inverso de s para (x, y) é dado por
![{\displaystyle {\begin{aligned}x&={\frac {1-s^{2}}{1+s^{2}}}\\[5pt]y&={\frac {2s}{1+s^{2}}}\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/f08d1a41825c29ff1f55d16dae15784d549e8179.svg)
Pode-se confirmar que x2 + y2 = 1 para todos os valores de s e t. Esses dois cartogramas fornecem um segundo atlas para o círculo, com o mapa de transição (isto é, essa relação entre s e t vale para todo ponto onde s e t são ambos não nulos).

Cada cartograma omite um único ponto, seja (−1, 0) para s ou (+1, 0) para t, portanto nenhum cartograma sozinho é suficiente para cobrir o círculo inteiro. Pode-se provar que não é possível cobrir o círculo completo com um único cartograma. Por exemplo, embora seja possível construir um círculo a partir de um único intervalo de reta sobrepondo e "colando" as extremidades, isso não produz um cartograma; uma porção do círculo seria mapeada para ambas as extremidades ao mesmo tempo, perdendo a invertibilidade.
Esfera
A esfera é um exemplo de superfície. A esfera unitária de equação implícita
- x2 + y2 + z2 – 1 = 0
pode ser coberta por um atlas de seis cartogramas: o plano z = 0 divide a esfera em dois hemisférios (z > 0 e z < 0), que podem ser ambos mapeados sobre o disco x2 + y2 < 1 pela projeção no plano xy de coordenadas. Isso fornece dois cartogramas; os outros quatro são fornecidos por uma construção semelhante com os outros dois planos coordenados.
Assim como com o círculo, pode-se definir um único cartograma que cobre toda a esfera exceto um ponto. Portanto, dois cartogramas são suficientes, mas a esfera não pode ser coberta por um único cartograma.
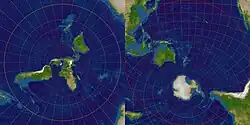
Este exemplo é historicamente significativo, pois motivou a terminologia; tornou-se evidente que toda a superfície da Terra não pode ter uma representação plana consistindo de um único mapa (também chamado de "cartograma", ver carta náutica), e por isso são necessários atlas para cobrir toda a superfície terrestre.
Outras curvas
Variedades não precisam ser conexas (todas "em uma só peça"); um exemplo é um par de círculos separados.
Variedades não precisam ser fechadas; assim, um segmento de reta sem seus pontos extremos é uma variedade. Elas nunca são contáveis, a menos que a dimensão da variedade seja 0. Reunindo essas liberdades, outros exemplos de variedades são uma parábola, uma hipérbole e o lugar dos pontos sobre uma curva cúbica y2 = x3 − x (uma parte em laço fechado e uma parte aberta e infinita).
Estão excluídos, porém, exemplos como dois círculos tangentes que compartilham um ponto formando um "8"; no ponto compartilhado, não é possível criar um cartograma satisfatório. Mesmo com a curvatura permitida pela topologia, a vizinhança do ponto compartilhado se parece com um "+", não com uma reta. Um "+" não é homeomorfo a um segmento de reta, pois remover o ponto central do "+" resulta em um espaço com quatro componentes (isto é, peças), enquanto remover um ponto de um segmento de reta resulta em um espaço com no máximo duas peças; operações topológicas sempre preservam o número de peças.
Definição
Informalmente, uma variedade é um espaço "modelado" no espaço euclidiano. Uma variedade pode ser construída fornecendo uma coleção de cartogramas de coordenadas, isto é, uma cobertura por conjuntos abertos com homeomorfismos para um espaço euclidiano, e funções de colagem: homeomorfismos de uma região do espaço euclidiano para outra região, caso correspondam à mesma parte da variedade em dois cartogramas de coordenadas diferentes. Uma variedade pode receber estrutura adicional se as funções de colagem satisfizerem axiomas além da continuidade. Por exemplo, variedades diferenciáveis possuem homeomorfismos em vizinhanças sobrepostas difeomorfos entre si, de modo que a variedade tem um conjunto bem definido de funções que são diferenciáveis em cada vizinhança e, portanto, diferenciáveis na variedade como um todo. Formalmente, uma variedade (topológica) é um espaço segundo contável de Hausdorff que é localmente homeomorfo a um espaço euclidiano. Segundo contável e Hausdorff são condições de topologia de conjuntos de pontos; segundo contável exclui espaços que são, em certo sentido, "grandes demais", como a reta longa, enquanto Hausdorff exclui espaços como "a reta com duas origens". Localmente homeomorfo a um espaço euclidiano significa que todo ponto possui uma vizinhança homeomorfa a um subconjunto aberto do espaço euclidiano para algum inteiro não negativo n. Isso implica que ou o ponto é um ponto isolado (se ), ou possui uma vizinhança homeomorfa à bola aberta Isso implica também que todo ponto possui uma vizinhança homeomorfa a , uma vez que é homeomorfo, e até difeomorfo, a qualquer bola aberta nele contida (para ). O n que aparece na definição anterior é chamado de dimensão local da variedade. Em geral, considera-se que as variedades possuem dimensão local constante, e a dimensão local é então chamada de dimensão da variedade. Este é, em particular, o caso quando as variedades são conexas. No entanto, alguns autores admitem variedades que não são conexas e nas quais pontos diferentes podem ter dimensões diferentes.[1] Se uma variedade possui dimensão fixa, isso pode ser enfatizado chamando-a de . Por exemplo, a (superfície de uma) esfera possui dimensão constante igual a 2 e é, portanto, uma variedade pura, ao passo que a união disjunta de uma esfera e uma reta no espaço tridimensional não é uma variedade pura. Como a dimensão é um invariante local (isto é, a função que associa a cada ponto a dimensão de sua vizinhança sobre a qual um cartograma está definido é localmente constante), cada componente conexa possui dimensão fixa. Do ponto de vista da teoria de feixes, uma variedade é um espaço anelado localmente, cujo feixe estrutural é localmente isomorfo ao feixe de funções contínuas (ou diferenciáveis, ou complexo-analíticas, etc.) sobre o espaço euclidiano. Essa definição é utilizada principalmente ao se discutir variedades analíticas em geometria algébrica.





Cartogramas, atlas e mapas de transição
A Terra esférica é navegada com o uso de mapas planos ou cartogramas, reunidos em um atlas. De forma análoga, uma variedade pode ser descrita por meio de mapas matemáticos, chamados cartogramas de coordenadas, reunidos em um atlas matemático. Em geral, não é possível descrever uma variedade com um único cartograma, pois a estrutura global da variedade é diferente da estrutura simples dos cartogramas. Por exemplo, nenhum mapa plano único pode representar a Terra inteira sem separar elementos adjacentes nas bordas do mapa ou duplicar a cobertura. Quando uma variedade é construída a partir de múltiplos cartogramas sobrepostos, as regiões de sobreposição carregam informações essenciais para a compreensão da estrutura global.
Cartogramas
Um mapa de coordenadas, um cartograma de coordenadas, ou simplesmente um cartograma, de uma variedade é um mapa invertível entre um subconjunto da variedade e um espaço simples, de modo que tanto o mapa quanto sua inversa preservam a estrutura desejada.[2] Para uma variedade topológica, o espaço simples é um subconjunto de algum espaço euclidiano e o interesse recai sobre a estrutura topológica. Essa estrutura é preservada por homeomorfismos, mapas invertíveis que são contínuos em ambas as direções.
No caso de uma variedade diferenciável, um conjunto de cartogramas chamado atlas, cujas funções de transição (ver abaixo) são todas diferenciáveis, nos permite fazer cálculo sobre ela. As coordenadas polares, por exemplo, formam um cartograma para o plano menos o semieixo positivo das abscissas e a origem. Outro exemplo de cartograma é o mapa χtopo mencionado anteriormente, um cartograma para o círculo.

Atlas
A descrição da maioria das variedades requer mais de um cartograma. Uma coleção específica de cartogramas que cobre uma variedade é chamada de atlas. Um atlas não é único, pois todas as variedades podem ser cobertas de múltiplas formas usando diferentes combinações de cartogramas. Dois atlas são ditos equivalentes se sua união também é um atlas.
O atlas que contém todos os cartogramas possíveis compatíveis com um dado atlas é chamado de atlas maximal (isto é, uma classe de equivalência contendo esse atlas dado). Ao contrário de um atlas ordinário, o atlas maximal de uma dada variedade é único. Embora útil para definições, é um objeto abstrato e não é usado diretamente (por exemplo, em cálculos).
Uma variedade pode ser definida como um espaço topológico equipado com um atlas (e em algumas definições, um atlas maximal).
Mapas de transição
Cartogramas de um atlas podem se sobrepor e um único ponto de uma variedade pode estar representado em vários cartogramas. Se dois cartogramas se sobrepõem, partes deles representam a mesma região da variedade, assim como um mapa da Europa e um mapa da Rússia podem ambos conter Moscou. Dados dois cartogramas sobrepostos, pode-se definir uma função de transição que vai de uma bola aberta em à variedade e de volta a outra (ou possivelmente a mesma) bola aberta em . O mapa resultante, como o mapa T no exemplo do círculo acima, é chamado de mudança de coordenadas, transformação de coordenadas, função de transição ou mapa de transição.
Estrutura adicional
Um atlas também pode ser usado para definir estrutura adicional sobre a variedade. A estrutura é primeiramente definida em cada cartograma separadamente. Se todos os mapas de transição forem compatíveis com essa estrutura, a estrutura se transfere para a variedade.
Essa é a forma padrão pela qual as variedades diferenciáveis são definidas. Se as funções de transição de um atlas para uma variedade topológica preservam a estrutura diferencial natural de (isto é, se são difeomorfismos), a estrutura diferencial se transfere para a variedade e a transforma em uma variedade diferenciável. As variedades complexas são introduzidas de maneira análoga, exigindo que as funções de transição de um atlas sejam funções holomorfas. Para variedades simpléticas, as funções de transição devem ser simplectomorfismos.
A estrutura sobre a variedade depende do atlas, mas às vezes diferentes atlas podem dar origem à mesma estrutura. Tais atlas são chamados de compatíveis.
Essas noções são formalizadas em geral por meio do uso de pseudogrupos.
Variedade com fronteira
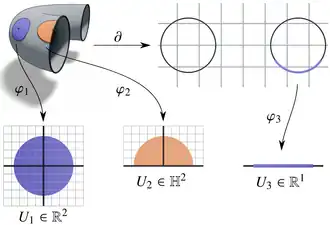
Uma variedade com fronteira é uma variedade com uma borda. Por exemplo, um disco (círculo mais interior) é uma 2-variedade cuja fronteira é o círculo, uma 1-variedade. A fronteira de uma -variedade com fronteira é uma -variedade. Em três dimensões, uma bola (esfera mais interior) é uma 3-variedade com fronteira. Sua fronteira é uma esfera, uma 2-variedade.


Em linguagem técnica, uma variedade com fronteira é um espaço que contém tanto pontos interiores quanto pontos de fronteira. Todo ponto interior possui uma vizinhança homeomorfa à -bola aberta . Todo ponto de fronteira possui uma vizinhança homeomorfa à "meia" -bola . Qualquer homeomorfismo entre meias-bolas deve enviar pontos com a pontos com . Essa invariância permite "definir" os pontos de fronteira; veja o parágrafo seguinte.



Se considerarmos ainda variedades diferenciáveis, então um quadrado com interior não é uma variedade com fronteira. Os quatro vértices não são localmente difeomorfos nem ao espaço euclidiano nem ao semiespaço euclidiano. Este é um exemplo de variedade diferenciável com cantos. De forma análoga, produtos de variedades diferenciáveis com fronteiras geralmente não são variedades diferenciáveis com fronteiras, mas sim variedades diferenciáveis com cantos.
Fronteira e interior
Seja uma variedade com fronteira. O interior de , denotado , é o conjunto dos pontos de que possuem vizinhanças homeomorfas a um subconjunto aberto de . A fronteira de , denotada , é o complemento de em . Os pontos de fronteira podem ser caracterizados como aqueles pontos que recaem sobre o hiperplano de fronteira de sob algum cartograma de coordenadas.





Se é uma variedade com fronteira de dimensão , então é uma variedade (sem fronteira) de dimensão e é uma variedade (sem fronteira) de dimensão .

Construção
Uma única variedade pode ser construída de diferentes maneiras, cada uma enfatizando um aspecto diferente da variedade, levando, assim, a pontos de vista ligeiramente diferentes.
Cartas
Talvez a maneira mais simples de construir uma variedade seja a usada no exemplo acima do círculo. Primeiro, identifica-se um subconjunto de e, em seguida, constrói-se um atlas que cobre esse subconjunto. O conceito de variedade desenvolveu-se historicamente a partir de construções como esta. Aqui está outro exemplo, aplicando este método à construção de uma esfera:
Esfera com cartas
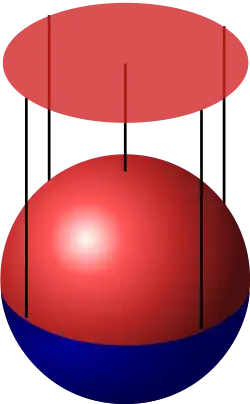
Uma esfera pode ser tratada quase da mesma forma que o círculo. Na matemática, uma esfera é apenas a superfície (não o interior sólido), que pode ser definida como um subconjunto de :


A esfera é bidimensional, então cada carta mapeará parte da esfera para um subconjunto aberto de . Considere o hemisfério norte, que é a parte com coordenada z positiva (colorida de vermelho na imagem à direita). A função χ definida por

mapeia o hemisfério norte para o disco unitário aberto, projetando-o no plano (x, y). Uma carta semelhante existe para o hemisfério sul. Juntamente com duas cartas projetadas no plano (x, z) e duas cartas projetadas no plano (y, z), obtém-se um atlas de seis cartas que cobre toda a esfera.
Isto pode ser facilmente generalizado para esferas de dimensões superiores.
Colagem de retalhos
Uma variedade pode ser construída colando pedaços de maneira consistente, transformando-os em cartas sobrepostas. Esta construção é possível para qualquer variedade e, por isso, é frequentemente usada como uma caracterização, especialmente para variedades diferenciáveis e riemannianas. Ela concentra-se em um atlas, pois os retalhos fornecem cartas naturalmente, e como não há espaço exterior envolvido, isso leva a uma visão intrínseca da variedade.
A variedade é construída especificando um atlas, que é, por si só, definido por mapas de transição. Um ponto da variedade é, portanto, uma classe de equivalência de pontos que são mapeados uns nos outros por mapas de transição. As cartas mapeiam classes de equivalência para pontos de um único retalho. Normalmente, existem fortes exigências quanto à consistência dos mapas de transição. Para variedades topológicas, exige-se que sejam homeomorfismos; se também forem difeomorfismos, a variedade resultante é uma variedade diferenciável.
Isto pode ser ilustrado com o mapa de transição t = 1⁄s da segunda metade do exemplo do círculo. Comece com duas cópias da reta. Use a coordenada s para a primeira cópia e t para a segunda cópia. Agora, cole ambas as cópias identificando o ponto t na segunda cópia com o ponto s = 1⁄t na primeira cópia (os pontos t = 0 e s = 0 não são identificados com nenhum ponto na primeira e na segunda cópia, respectivamente). Isto resulta num círculo.
Visão intrínseca e extrínseca
A primeira construção e esta construção são muito semelhantes, mas representam pontos de vista bastante diferentes. Na primeira construção, a variedade é vista como mergulhada em algum espaço euclidiano. Esta é a visão extrínseca. Quando uma variedade é vista desta forma, é fácil usar a intuição dos espaços euclidianos para definir estruturas adicionais. Por exemplo, em um espaço euclidiano, é sempre claro se um vetor em algum ponto é tangente ou normal a alguma superfície que passa por esse ponto.
A construção por retalhos não utiliza nenhum mergulho, mas simplesmente vê a variedade como um espaço topológico por si só. Este ponto de vista abstrato é chamado de visão intrínseca. Isso pode tornar mais difícil imaginar o que seria um vetor tangente, e não há uma noção intrínseca de um fibrado normal, mas sim um fibrado normal estável intrínseco.
n-esfera como uma colagem
A n-esfera Sn é uma generalização da ideia de um círculo (1-esfera) e da esfera (2-esfera) para dimensões superiores. Uma n-esfera Sn pode ser construída colando duas cópias de . O mapa de transição entre elas é a inversão em uma esfera, definida como

Esta função é a sua própria inversa e, portanto, pode ser usada em ambas as direções. Como o mapa de transição é uma função suave, este atlas define uma variedade suave. No caso n = 1, o exemplo simplifica-se para o exemplo do círculo dado anteriormente.
Identificando pontos de uma variedade
É possível definir diferentes pontos de uma variedade como sendo o mesmo ponto. Isso pode ser visualizado como a colagem desses pontos em um único ponto, formando um espaço quociente. Não há, entretanto, nenhuma razão para esperar que tais espaços quocientes sejam variedades. Entre os possíveis espaços quocientes que não são necessariamente variedades, os orbifolds e os complexos CW são considerados relativamente bem comportados. Um exemplo de um espaço quociente de uma variedade que também é uma variedade é o espaço projetivo real, identificado como um espaço quociente da esfera correspondente.
Um método de identificar pontos (colá-los) é através de uma ação à direita (ou à esquerda) de um grupo, que age sobre a variedade. Dois pontos são identificados se um for movido para o outro por algum elemento do grupo. Se M é a variedade e G é o grupo, o espaço quociente resultante é denotado por M / G (ou G \ M).
Variedades que podem ser construídas pela identificação de pontos incluem toros e espaços projetivos reais (começando com um plano e uma esfera, respectivamente).
Colagem ao longo de fronteiras
Duas variedades com fronteira podem ser coladas ao longo de uma fronteira. Se isso for feito da maneira correta, o resultado também será uma variedade. De forma semelhante, duas fronteiras de uma única variedade podem ser coladas.
Formalmente, a colagem é definida por uma bijeção entre as duas fronteiras. Dois pontos são identificados quando são mapeados um no outro. Para uma variedade topológica, esta bijeção deve ser um homeomorfismo, caso contrário o resultado não será uma variedade topológica. De forma semelhante, para uma variedade diferenciável, deve ser um difeomorfismo. Para outras variedades, outras estruturas devem ser preservadas.
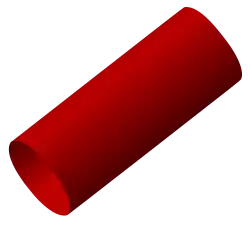
Um cilindro finito pode ser construído como uma variedade começando com uma faixa [0,1] × [0,1] e colando um par de arestas opostas na fronteira por um difeomorfismo adequado. Um plano projetivo pode ser obtido colando uma esfera com um buraco nela a uma faixa de Möbius ao longo de suas respectivas fronteiras circulares.
Produtos cartesianos
O produto cartesiano de variedades também é uma variedade.
A dimensão da variedade produto é a soma das dimensões dos seus fatores. A sua topologia é a topologia produto, e um produto cartesiano de cartas é uma carta para a variedade produto. Assim, um atlas para a variedade produto pode ser construído usando atlas de seus fatores. Se esses atlas definem uma estrutura diferenciável nos fatores, o atlas correspondente define uma estrutura diferenciável na variedade produto. O mesmo é válido para qualquer outra estrutura definida nos fatores. Se um dos fatores tem uma fronteira, a variedade produto também tem uma fronteira. Produtos cartesianos podem ser usados para construir toros e cilindros finitos, por exemplo, como S1 × S1 e S1 × [0,1], respectivamente.
História
O estudo das variedades combina muitas áreas importantes da matemática: ele generaliza conceitos como curvas e superfícies, bem como ideias da álgebra linear e topologia.
Desenvolvimento inicial
Antes do conceito moderno de uma variedade, houve vários resultados importantes.
A geometria não euclidiana considera espaços onde o postulado das paralelas de Euclides falha. Saccheri estudou tais geometrias pela primeira vez em 1733, mas buscou apenas refutá-las. Gauss, Bolyai e Lobachevsky as descobriram independentemente 100 anos depois. A pesquisa deles revelou dois tipos de espaços cujas estruturas geométricas diferem daquela do espaço euclidiano clássico; estes deram origem à geometria hiperbólica e à geometria elíptica. Na teoria moderna das variedades, essas noções correspondem a variedades riemannianas com curvatura constante negativa e positiva, respectivamente.
Carl Friedrich Gauss pode ter sido o primeiro a considerar espaços abstratos como objetos matemáticos em seu próprio direito. O seu theorema egregium fornece um método para calcular a curvatura de uma superfície sem considerar o espaço ambiente no qual a superfície se encontra. Tal superfície seria, na terminologia moderna, chamada de variedade; e, em termos modernos, o teorema provou que a curvatura da superfície é uma propriedade intrínseca. A teoria das variedades passou a se concentrar exclusivamente nessas propriedades intrínsecas (ou invariantes), ao passo que ignora amplamente as propriedades extrínsecas do espaço ambiente.
Outro exemplo, mais topológico, de uma propriedade topológica intrínseca de uma variedade é a sua característica de Euler. Leonhard Euler mostrou que para um polítopo convexo no espaço euclidiano tridimensional com V vértices (ou cantos), E arestas e F faces,A mesma fórmula será válida se projetarmos os vértices e arestas do polítopo em uma esfera, criando um mapa topológico com V vértices, E arestas e F faces, e, de fato, permanecerá verdadeira para qualquer mapa esférico, mesmo que não surja de nenhum polítopo convexo.[3] Assim, 2 é um invariante topológico da esfera, chamado de sua característica de Euler. Por outro lado, um toro pode ser fatiado e aberto por seus círculos 'paralelos' e 'meridianos', criando um mapa com V = 1 vértice, E = 2 arestas e F = 1 face. Portanto, a característica de Euler do toro é 1 − 2 + 1 = 0. A característica de Euler de outras superfícies é um invariante topológico útil, que pode ser estendido para dimensões superiores usando os números de Betti. Em meados do século XIX, o teorema de Gauss-Bonnet ligou a característica de Euler à curvatura gaussiana.

Síntese
As investigações de Niels Henrik Abel e Carl Gustav Jacobi sobre a inversão de integrais elípticas na primeira metade do século XIX levaram-nos a considerar tipos especiais de variedades complexas, agora conhecidas como jacobianas. Bernhard Riemann contribuiu ainda mais para a teoria deles, esclarecendo o significado geométrico do processo de prolongamento analítico de funções de variáveis complexas.
Outra importante fonte de variedades na matemática do século XIX foi a mecânica analítica, conforme desenvolvida por Siméon Poisson, Jacobi e William Rowan Hamilton. Os estados possíveis de um sistema mecânico são pensados como pontos de um espaço abstrato, o espaço de fase nos formalismos lagrangiano e hamiltoniano da mecânica clássica. Este espaço é, na verdade, uma variedade de alta dimensão, cuja dimensão corresponde aos graus de liberdade do sistema e onde os pontos são especificados por suas coordenadas generalizadas. Para um movimento sem restrições de partículas livres, a variedade é equivalente ao espaço euclidiano, mas várias leis de conservação o restringem a formações mais complicadas, por exemplo, os toros de Liouville. A teoria de um corpo sólido em rotação, desenvolvida no século XVIII por Leonhard Euler e Joseph-Louis Lagrange, fornece outro exemplo onde a variedade é não trivial. Os aspectos geométricos e topológicos da mecânica clássica foram enfatizados por Henri Poincaré, um dos fundadores da topologia.
Riemann foi o primeiro a fazer um trabalho extensivo generalizando a ideia de uma superfície para dimensões superiores. O nome variedade (em inglês, manifold) vem do termo original em alemão de Riemann, Mannigfaltigkeit, que William Kingdon Clifford traduziu como "manifoldness" (multiplicidade). Em sua palestra inaugural em Göttingen, Riemann descreveu o conjunto de todos os valores possíveis de uma variável com certas restrições como um Mannigfaltigkeit, porque a variável pode ter muitos valores. Ele distingue entre stetige Mannigfaltigkeit e diskrete Mannigfaltigkeit (multiplicidade contínua e multiplicidade descontínua), dependendo de o valor mudar continuamente ou não. Como exemplos contínuos, Riemann refere-se não apenas às cores e localizações dos objetos no espaço, mas também às formas possíveis de uma figura espacial. Usando indução, Riemann constrói um n-fach ausgedehnte Mannigfaltigkeit (multiplicidade estendida n vezes ou multiplicidade n-dimensional) como uma pilha contínua de multiplicidades (n−1) dimensionais. A noção intuitiva de Riemann de um Mannigfaltigkeit evoluiu para o que hoje é formalizado como uma variedade. As variedades riemannianas e as superfícies de Riemann recebem o nome em homenagem a Riemann.
A definição de Poincaré
Em seu artigo muito influente, Analysis Situs,[4] Henri Poincaré deu uma definição de uma variedade diferenciável (variété) que serviu como precursora para o conceito moderno de uma variedade.[5]
Na primeira seção de Analysis Situs, Poincaré define uma variedade como o conjunto de nível de uma função continuamente diferenciável entre espaços euclidianos que satisfaz a hipótese de não degenerescência do teorema da função implícita. Na terceira seção, ele começa observando que o gráfico de uma função continuamente diferenciável é uma variedade neste último sentido. Ele então propõe uma nova definição, mais geral, de variedade baseada em uma 'cadeia de variedades' (une chaîne des variétés).
A noção de Poincaré de uma cadeia de variedades é uma precursora da noção moderna de atlas. Em particular, ele considera duas variedades definidas respectivamente como gráficos das funções e . Se essas variedades se sobrepõem (a une partie commune), então ele exige que as coordenadas dependam de forma continuamente diferenciável das coordenadas e vice-versa ('...les sont fonctions analytiques des et inversement'). Desta forma, ele introduz um precursor à noção de uma carta e de um mapa de transição.



Por exemplo, o círculo unitário no plano pode ser pensado como o gráfico da função ou então a função numa vizinhança de todo ponto exceto os pontos (1, 0) e (−1, 0); e numa vizinhança desses pontos, pode ser pensado como o gráfico de, respectivamente, e . O círculo pode ser representado por um gráfico na vizinhança de todo ponto porque o lado esquerdo da sua equação definidora tem gradiente não nulo em todos os pontos do círculo. Pelo teorema da função implícita, toda subvariedade do espaço euclidiano é localmente o gráfico de uma função.





Hermann Weyl deu uma definição intrínseca para variedades diferenciáveis em seu curso de palestras sobre superfícies de Riemann em 1911–1912, abrindo caminho para o conceito geral de um espaço topológico que se seguiu logo depois. Durante a década de 1930, Hassler Whitney e outros esclareceram os aspectos fundamentais do assunto e, assim, as intuições que remontam à segunda metade do século XIX tornaram-se precisas, e desenvolveram-se através da geometria diferencial e da teoria dos grupos de Lie. Notavelmente, o teorema de mergulho de Whitney[6] mostrou que a definição intrínseca em termos de cartas era equivalente à definição de Poincaré em termos de subconjuntos do espaço euclidiano.
Topologia das variedades: destaques
As variedades bidimensionais, também conhecidas como superfícies 2D mergulhadas no nosso espaço 3D comum, foram consideradas por Riemann sob o disfarce de superfícies de Riemann, e rigorosamente classificadas no início do século XX por Poul Heegaard e Max Dehn. Poincaré foi pioneiro no estudo de variedades tridimensionais e levantou uma questão fundamental sobre elas, hoje conhecida como a conjectura de Poincaré. Após quase um século, Grigori Perelman provou a conjectura de Poincaré (veja a Solução da conjectura de Poincaré). O programa de geometrização de William Thurston, formulado na década de 1970, forneceu uma extensão de longo alcance da conjectura de Poincaré para as variedades tridimensionais gerais. Variedades quadridimensionais foram trazidas para a vanguarda da pesquisa matemática na década de 1980 por Michael Freedman e, em um cenário diferente, por Simon Donaldson, que foi motivado pelos recentes progressos na física teórica (teoria de Yang-Mills), onde elas servem como um substituto para o espaço-tempo 'plano' ordinário. Andrey Markov Jr. mostrou em 1960 que não existe algoritmo para classificar variedades quadridimensionais. Trabalhos importantes sobre variedades de dimensões superiores, incluindo análogos da conjectura de Poincaré, haviam sido feitos anteriormente por René Thom, John Milnor, Stephen Smale e Sergei Novikov. Uma técnica muito onipresente e flexível subjacente a muito do trabalho sobre a topologia das variedades é a teoria de Morse.
Estrutura adicional
Variedades topológicas
O tipo mais simples de variedade a ser definido é a variedade topológica, que se parece localmente com algum espaço euclidiano "comum" . Por definição, todas as variedades são variedades topológicas, de modo que a expressão "variedade topológica" é usualmente empregada para enfatizar que uma variedade carece de estrutura adicional, ou que apenas suas propriedades topológicas estão sendo consideradas. Formalmente, uma variedade topológica é um espaço topológico localmente homeomorfo a um espaço euclidiano. Isso significa que todo ponto possui uma vizinhança para a qual existe um homeomorfismo (uma função contínua bijetiva cuja inversa também é contínua) mapeando essa vizinhança para . Esses homeomorfismos são as cartas da variedade.
Uma variedade topológica se parece localmente com um espaço euclidiano de uma maneira bastante fraca: embora para cada carta individual seja possível distinguir funções diferenciáveis ou medir distâncias e ângulos, o simples fato de ser uma variedade topológica não faz com que um espaço tenha qualquer escolha particular e consistente de tais conceitos.[7] Para discutir tais propriedades para uma variedade, é necessário especificar uma estrutura adicional e considerar as variedades diferenciáveis e as variedades riemannianas, discutidas abaixo. Em particular, a mesma variedade topológica subjacente pode ter várias classes mutuamente incompatíveis de funções diferenciáveis e um número infinito de maneiras de especificar distâncias e ângulos.
Geralmente, suposições técnicas adicionais sobre o espaço topológico são feitas para excluir casos patológicos. É costume exigir que o espaço seja de Hausdorff e segundo-contável.
A dimensão da variedade em um certo ponto é a dimensão do espaço euclidiano para o qual as cartas naquele ponto são mapeadas (o número n na definição). Todos os pontos em uma variedade conexa têm a mesma dimensão. Alguns autores exigem que todas as cartas de uma variedade topológica mapeiem para espaços euclidianos de mesma dimensão. Nesse caso, toda variedade topológica possui um invariante topológico, a sua dimensão.
Variedades diferenciáveis
Para a maioria das aplicações, utiliza-se um tipo especial de variedade topológica, a saber, a variedade diferenciável. Se as cartas locais em uma variedade forem compatíveis em um certo sentido, pode-se definir direções, espaços tangentes e funções diferenciáveis nessa variedade. Em particular, é possível usar o cálculo em uma variedade diferenciável. Cada ponto de uma variedade diferenciável de dimensão n possui um espaço tangente. Este é um espaço euclidiano de dimensão n consistindo nos vetores tangentes das curvas que passam pelo ponto.
Duas classes importantes de variedades diferenciáveis são as variedades suaves e as variedades analíticas. Para variedades suaves, os mapas de transição são suaves, isto é, infinitamente diferenciáveis. Variedades analíticas são variedades suaves com a condição adicional de que os mapas de transição são analíticos (podem ser expressos como séries de potências). Pode-se dar uma estrutura analítica à esfera, assim como à maioria das curvas e superfícies familiares.
Um conjunto retificável generaliza a ideia de uma curva suave por partes ou curva retificável para dimensões superiores; no entanto, conjuntos retificáveis não são variedades em geral.
Variedades riemannianas
Para medir distâncias e ângulos em variedades, a variedade deve ser riemanniana. Uma variedade riemanniana é uma variedade diferenciável na qual cada espaço tangente é equipado com um produto interno de uma maneira que varia suavemente de ponto a ponto. Dados dois vetores tangentes u e v, o produto interno fornece um número real. O produto escalar (ou produto interno padrão) é um exemplo típico de um produto interno. Isso permite definir várias noções, como comprimento, ângulos, áreas (ou volumes), curvatura e divergência de campos vetoriais.


A todas as variedades diferenciáveis (de dimensão constante) pode ser dada a estrutura de uma variedade riemanniana. O próprio espaço euclidiano carrega uma estrutura natural de variedade riemanniana (os espaços tangentes são naturalmente identificados com o próprio espaço euclidiano e carregam o produto escalar padrão do espaço). Muitas curvas e superfícies familiares, incluindo, por exemplo, todas as n-esferas, são especificadas como subespaços de um espaço euclidiano e herdam uma métrica do seu mergulho nele.
Variedades de Finsler
Uma variedade de Finsler permite a definição de distância, mas não requer o conceito de ângulo; é uma variedade analítica na qual cada espaço tangente é equipado com uma norma, , de uma maneira que varia suavemente de ponto a ponto. Esta norma pode ser estendida a uma métrica, definindo o comprimento de uma curva; mas, em geral, não pode ser usada para definir um produto interno.

Qualquer variedade riemanniana é uma variedade de Finsler.
Grupos de Lie
Grupos de Lie, nomeados em homenagem a Sophus Lie, são variedades diferenciáveis que também carregam a estrutura de um grupo, de tal modo que as operações do grupo são definidas por mapas suaves.
Um espaço vetorial euclidiano com a operação de grupo de adição de vetores é um exemplo de um grupo de Lie não compacto. Um exemplo simples de um grupo de Lie compacto é o círculo: a operação do grupo é simplesmente a rotação. Este grupo, conhecido como U(1), também pode ser caracterizado como o grupo dos números complexos de módulo 1 com a multiplicação como a operação do grupo.
Outros exemplos de grupos de Lie incluem grupos especiais de matrizes, que são todos subgrupos do grupo linear geral, o grupo de matrizes n × n com determinante não nulo. Se as entradas da matriz forem números reais, esta será uma variedade desconexa de dimensão n². Os grupos ortogonais, os grupos de simetria da esfera e das hiperesferas, são variedades de dimensão n(n−1)/2, onde n−1 é a dimensão da esfera. Outros exemplos podem ser encontrados na lista de grupos de Lie.
Outros tipos de variedades
- Uma variedade complexa é uma variedade cujas cartas assumem valores em e cujas funções de transição são holomorfas nas sobreposições. Essas variedades são os objetos básicos de estudo na geometria complexa. Uma variedade de dimensão complexa um é chamada de superfície de Riemann. Uma variedade complexa de dimensão n possui dimensão 2n como uma variedade diferenciável real.
- Uma variedade CR (variedade de Cauchy-Riemann) é uma variedade modelada nas fronteiras de domínios em .
- 'Variedades de dimensão infinita': para permitir dimensões infinitas, pode-se considerar variedades de Banach, que são localmente homeomorfas a espaços de Banach. De forma semelhante, variedades de Fréchet são localmente homeomorfas a espaços de Fréchet.
- Uma variedade simplética é um tipo de variedade usada para representar os espaços de fase na mecânica clássica. Elas são dotadas de uma 2-forma que define o parêntese de Poisson. Um tipo de variedade intimamente relacionado é a variedade de contato.
- Uma variedade combinatória é um tipo de variedade que constitui a discretização de uma variedade. Geralmente, significa uma variedade linear por partes feita por complexos simpliciais.
- Uma variedade digital é um tipo especial de variedade combinatória que é definida no espaço digital. Veja topologia digital.

Classificação e invariantes
Diferentes noções de variedades possuem diferentes noções de classificação e invariantes; nesta seção, nós nos concentramos nas variedades fechadas suaves.
A classificação de variedades fechadas suaves é bem compreendida em princípio, exceto na dimensão 4: em dimensões baixas (2 e 3) ela é geométrica, por meio do teorema de uniformização e da solução da conjectura de Poincaré, e em dimensões altas (5 e acima) é algébrica, por meio da teoria de cirurgia. Esta é uma classificação em princípio: a questão geral de saber se duas variedades suaves são difeomorfas não é computável em geral. Além disso, cálculos específicos continuam sendo difíceis, e há muitas questões em aberto.
Superfícies orientáveis podem ser visualizadas, e as suas classes de difeomorfismo enumeradas, pelo gênero. Dadas duas superfícies orientáveis, pode-se determinar se elas são difeomorfas calculando os seus respectivos gêneros e comparando-os: elas são difeomorfas se e somente se os gêneros forem iguais, de modo que o gênero forma um conjunto completo de invariantes.
Isto é muito mais difícil em dimensões superiores: as variedades de dimensões superiores não podem ser visualizadas diretamente (embora a intuição visual seja útil para compreendê-las), nem as suas classes de difeomorfismo podem ser enumeradas, tampouco se pode, em geral, determinar se duas descrições diferentes de uma variedade de dimensão superior se referem ao mesmo objeto.
No entanto, pode-se determinar se duas variedades são diferentes se houver alguma característica intrínseca que as diferencie. Tais critérios são comumente referidos como invariantes porque, embora possam ser definidos em termos de alguma apresentação (como o gênero em termos de uma triangulação), eles são os mesmos em relação a todas as descrições possíveis de uma variedade particular: eles são invariantes sob diferentes descrições.
Poderia-se esperar desenvolver um arsenal de critérios invariantes que classificaria definitivamente todas as variedades a menos de isomorfismo. Sabe-se que para variedades de dimensão 4 e superior, não existe nenhum programa que possa decidir se duas variedades são difeomorfas.
Variedades suaves têm um rico conjunto de invariantes, provenientes da topologia de conjunto de pontos, da topologia algébrica clássica e da topologia geométrica. Os invariantes mais familiares, que são visíveis para superfícies, são a orientabilidade (um invariante normal, também detectado pela homologia) e o gênero (um invariante homológico).
Variedades fechadas suaves não possuem invariantes locais (além da dimensão), embora as variedades geométricas tenham invariantes locais, notavelmente a curvatura de uma variedade riemanniana e a torção de uma variedade equipada com uma conexão afim. Essa distinção entre invariantes locais e ausência de invariantes locais é uma maneira comum de distinguir entre a geometria e a topologia. Todos os invariantes de uma variedade fechada suave são, portanto, globais.
A topologia algébrica é uma fonte de uma série de importantes propriedades invariantes globais. Alguns critérios essenciais incluem a propriedade de ser simplesmente conexa e a orientabilidade (veja abaixo). De fato, vários ramos da matemática, como a teoria da homologia e da homotopia, e a teoria das classes características, foram fundados com o propósito de estudar as propriedades invariantes das variedades.
Superfícies
Orientabilidade
Em dimensões dois e superiores, um critério invariante simples mas importante é a questão de saber se uma variedade admite uma orientação significativa. Considere uma variedade topológica com cartas mapeando para . Dada uma base ordenada para , uma carta faz com que o seu pedaço da variedade adquira por si só um sentido de ordenação, que em 3 dimensões pode ser visto como dextrogiro (regra da mão direita) ou levogiro (regra da mão esquerda). Cartas sobrepostas não são obrigadas a concordar em seu sentido de ordenação, o que confere às variedades uma liberdade importante. Para algumas variedades, como a esfera, as cartas podem ser escolhidas de modo que as regiões sobrepostas concordem em sua "orientação" (lateralidade); estas são as variedades orientáveis. Para outras, isto é impossível. Esta última possibilidade é fácil de ser ignorada, porque qualquer superfície fechada mergulhada (sem autointerseção) no espaço tridimensional é orientável.
Alguns exemplos ilustrativos de variedades não orientáveis incluem: (1) a faixa de Möbius, que é uma variedade com fronteira, (2) a garrafa de Klein, que deve interceptar a si mesma em sua representação no espaço 3D, e (3) o plano projetivo real, que surge naturalmente na geometria.
Faixa de Möbius
Comece com um cilindro circular infinito posicionado verticalmente, uma variedade sem fronteira. Fatie-o transversalmente em cima e embaixo para produzir duas fronteiras circulares e a faixa cilíndrica entre elas. Esta é uma variedade orientável com fronteira, sobre a qual uma "cirurgia" será realizada. Corte a faixa para abri-la, de modo que ela possa se desenrolar para se tornar um retângulo, mas segure as extremidades cortadas. Torça uma extremidade em 180°, fazendo a superfície interna voltar-se para fora, e cole as extremidades novamente de forma contínua. Isso resulta em uma faixa com uma meia torção permanente: a faixa de Möbius. A sua fronteira já não é um par de círculos, mas (topologicamente) um único círculo; e o que antes era o seu "lado de dentro" fundiu-se com o seu "lado de fora", de modo que agora possui apenas um único lado. Semelhantemente à garrafa de Klein abaixo, esta superfície bidimensional precisaria interceptar a si mesma em duas dimensões, mas pode ser facilmente construída em três ou mais dimensões.
Garrafa de Klein
Pegue duas faixas de Möbius; cada uma possui um único laço como fronteira. Endireite esses laços transformando-os em círculos, e deixe as faixas se distorcerem em cross-caps (tampas cruzadas). Colar os círculos um no outro produzirá uma nova variedade fechada sem fronteira, a garrafa de Klein. Fechar a superfície não faz nada para melhorar a falta de orientabilidade, apenas remove a fronteira. Assim, a garrafa de Klein é uma superfície fechada sem distinção entre o lado de dentro e o lado de fora. No espaço tridimensional, a superfície de uma garrafa de Klein deve passar por si mesma. Construir uma garrafa de Klein que não se autointercepte requer quatro ou mais dimensões de espaço.
Plano projetivo real
Comece com uma esfera centrada na origem. Toda reta que passa pela origem perfura a esfera em dois pontos opostos chamados antípodas. Embora não haja maneira de fazer isso fisicamente, é possível (ao considerar um espaço quociente) fundir matematicamente cada par antípoda em um único ponto. A superfície fechada assim produzida é o plano projetivo real, mais uma superfície não orientável. Ele possui uma série de descrições e construções equivalentes, mas este caminho explica o seu nome: todos os pontos em qualquer reta dada passando pela origem se projetam no mesmo "ponto" neste "plano".
Gênero e a característica de Euler
Para variedades bidimensionais, uma propriedade invariante fundamental é o gênero, ou o "número de alças" presentes em uma superfície. Um toro é uma esfera com uma alça, um duplo toro é uma esfera com duas alças, e assim por diante. De fato, é possível caracterizar completamente as variedades compactas bidimensionais com base no gênero e na orientabilidade. Em variedades de dimensões superiores, o gênero é substituído pela noção de característica de Euler e, mais geralmente, pelos números de Betti e pela homologia e coomologia.
Mapas de variedades
Assim como existem vários tipos de variedades, existem vários tipos de mapas de variedades (ou aplicações entre variedades). Além de funções contínuas e funções suaves em geral, existem mapas com propriedades especiais. Na topologia geométrica, um tipo básico são os mergulhos, dos quais a teoria dos nós é um exemplo central, e generalizações como imersões, submersões, espaços de recobrimento e espaços de recobrimento ramificados. Resultados básicos incluem o teorema de mergulho de Whitney e o teorema de imersão de Whitney.
Na geometria riemanniana, pode-se pedir que os mapas preservem a métrica riemanniana, levando às noções de mergulhos isométricos, imersões isométricas e submersões riemannianas; um resultado básico é o teorema de mergulho de Nash.
Funções a valores escalares
Um exemplo básico de mapas entre variedades são as funções a valores escalares em uma variedade, ou


às vezes chamadas de funções regulares ou funcionais, por analogia com a geometria algébrica ou álgebra linear. Estas são de interesse tanto por si mesmas, quanto para estudar a variedade subjacente.
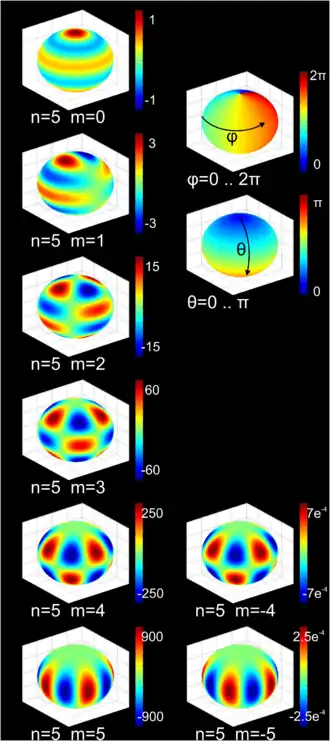
Na topologia geométrica, as mais comumente estudadas são as funções de Morse, que produzem decomposições em corpos com alças (handlebodies), enquanto na análise matemática, frequentemente estuda-se a solução de equações diferenciais parciais, cujo exemplo importante é a análise harmônica, onde se estudam as funções harmônicas: o núcleo do operador de Laplace. Isso leva a funções como os harmônicos esféricos, e a métodos do núcleo do calor para estudar variedades, como em ouvir a forma de um tambor e algumas demonstrações do teorema do índice de Atiyah-Singer.
Generalizações de variedades
- Variedades de dimensão infinita
- A definição de uma variedade pode ser generalizada descartando-se a exigência de dimensionalidade finita. Assim, uma variedade de dimensão infinita é um espaço topológico localmente homeomorfo a um espaço vetorial topológico sobre os reais. Isso omite os axiomas de conjunto de pontos, permitindo cardinalidades maiores e variedades não Hausdorff; e omite a dimensão finita, permitindo estruturas como as variedades de Hilbert a serem modeladas em espaços de Hilbert, as variedades de Banach a serem modeladas em espaços de Banach e as variedades de Fréchet a serem modeladas em espaços de Fréchet. Normalmente relaxa-se uma ou outra condição: variedades com os axiomas de conjunto de pontos são estudadas na topologia geral, enquanto variedades de dimensão infinita são estudadas na análise funcional.
- Orbifolds
- Um orbifold é uma generalização de variedade que permite certos tipos de "singularidades" na topologia. Grosso modo, é um espaço que localmente se parece com os quocientes de algum espaço simples (ex.: espaço euclidiano) pelas ações de vários grupos finitos. As singularidades correspondem a pontos fixos das ações de grupo, e as ações devem ser compatíveis em um certo sentido.
- Variedades algébricas e esquemas
- Variedades algébricas não singulares sobre os números reais ou complexos são variedades. Generaliza-se isso primeiramente permitindo singularidades, em segundo lugar permitindo diferentes corpos, e em terceiro lugar emulando a construção de colagem de variedades: assim como uma variedade é colada a partir de subconjuntos abertos do espaço euclidiano, uma variedade algébrica é colada a partir de variedades algébricas afins, que são conjuntos de zeros de polinômios sobre corpos algebricamente fechados. Esquemas são, da mesma forma, colados a partir de esquemas afins, que são uma generalização das variedades algébricas. Ambos estão relacionados às variedades, mas são construídos algebricamente usando feixes em vez de atlas.
- Devido aos pontos singulares, uma variedade algébrica (variety) em geral não é uma variedade topológica ou diferenciável (manifold), embora linguisticamente os termos em francês variété, em alemão Mannigfaltigkeit e em inglês manifold sejam amplamente sinônimos. Em francês, uma variedade algébrica é chamada de une variété algébrique (uma variedade algébrica), enquanto uma variedade suave é chamada de une variété différentielle (uma variedade diferencial).
- Espaço estratificado
- Um "espaço estratificado" é um espaço que pode ser dividido em pedaços ("estratos"), sendo cada estrato uma variedade, com os estratos se encaixando de maneiras prescritas (formalmente, uma filtração por subconjuntos fechados).[8] Existem várias definições técnicas, notavelmente um espaço estratificado de Whitney (veja condições de Whitney) para variedades suaves e um espaço topologicamente estratificado para variedades topológicas. Exemplos básicos incluem variedade com fronteira (variedade de dimensão máxima e fronteira de codimensão 1) e variedades com cantos (variedade de dimensão máxima, fronteira de codimensão 1, cantos de codimensão 2). Espaços estratificados de Whitney formam uma ampla classe de espaços, incluindo variedades algébricas, variedades analíticas, conjuntos semialgébricos e conjuntos subanalíticos.
- Complexos CW
- Um complexo CW é um espaço topológico formado pela colagem de discos de diferentes dimensionalidades. Em geral, o espaço resultante é singular, logo não é uma variedade. No entanto, eles são de interesse central na topologia algébrica, especialmente na teoria da homotopia.
- Variedades de homologia
- Uma variedade de homologia é um espaço que se comporta como uma variedade do ponto de vista da teoria da homologia. Nem todos esses espaços são variedades, mas (em dimensões altas) podem ser analisados pela teoria de cirurgia de forma semelhante às variedades, e a falha em ser uma variedade é uma obstrução local, como na teoria de cirurgia.[9]
- Espaços diferenciais
- Seja M um conjunto não vazio. Suponha que alguma família de funções reais em M foi escolhida. Denote-a por . Trata-se de uma álgebra em relação à adição e multiplicação ponto a ponto. Seja M equipado com a topologia induzida por C. Suponha também que as seguintes condições sejam válidas. Primeira: para todo , onde , e arbitrários, a composição . Segunda: toda função, que em cada ponto de M coincide localmente com alguma função de C, também pertence a C. Um par (M, C) para o qual as condições acima são válidas é chamado de espaço diferencial de Sikorski.[10]





Ver também
- Teoria das variedades
- Geodésica
- Matemática da relatividade geral
- Subvariedade
- Variedade tridimensional
Referências
- ↑ Ver, por exemplo, Riaza, Ricardo (2008), Differential-Algebraic Systems: Analytical Aspects and Circuit Applications, ISBN 978-981-279-181-8, World Scientific, p. 110; Gunning, R. C. (1990), Introduction to Holomorphic Functions of Several Variables, Volume 2, ISBN 978-0-534-13309-2, CRC Press, p. 73.
- ↑ Shigeyuki Morita; Teruko Nagase; Katsumi Nomizu (2001). Geometry of Differential Forms. [S.l.]: American Mathematical Society. p. 12. ISBN 0-8218-1045-6
- ↑ A noção de um mapa pode ser formalizada como uma decomposição celular.
- ↑ Poincaré, H. (1895). «Analysis Situs». Gauthier-Villars. Journal de l'École Polytechnique. Serié 11 (em francês)
- ↑ Arnolʹd, V. I. (1998). «О преподавании математики» [On Teaching Mathematics]. Uspekhi Mat. Nauk (em russo). 53 (319): 229–234. doi:10.4213/rm5
 ; tradução em Russian Math. Surveys 53 (1998), no. 1, 229–236
; tradução em Russian Math. Surveys 53 (1998), no. 1, 229–236 - ↑ Whitney, H. (1936). «Differentiable Manifolds». Annals of Mathematics. Second Series. 37 (3): 645–680. JSTOR 1968482. doi:10.2307/1968482
- ↑ Kervaire, M. (1961). «A Manifold which does not admit any differentiable structure». Comment. Math. Helv. 35 (1): 1–14. doi:10.1007/BF02565940
- ↑ Ross, Ethan (1 de abril de 2024). «Stratified vector bundles: Examples and constructions». Journal of Geometry and Physics. 198. Bibcode:2024JGP...19805114R. ISSN 0393-0440. arXiv:2303.04200. doi:10.1016/j.geomphys.2024.105114. Consultado em 19 de maio de 2024. Cópia arquivada em 19 de maio de 2024 Parâmetro desconhecido
|numero-artigo=ignorado (ajuda) - ↑ Bryant, J.; Ferry, S.; Mio, W.; Weinberger, S. (1996). «Topology of homology manifolds». Annals of Mathematics. Second Series. 143 (3): 435–467. JSTOR 2118532. arXiv:math/9304210. doi:10.2307/2118532
- ↑ Sikorski, R. (1967). «Abstract covariant derivative». Colloquium Mathematicum. 18: 251–272. doi:10.4064/cm-18-1-251-272
Bibliografia
- Freedman, Michael H., and Quinn, Frank (1990) Topology of 4-Manifolds. Princeton University Press. ISBN 0-691-08577-3.
- Guillemin, Victor and Pollack, Alan (1974) Differential Topology. Prentice-Hall. ISBN 0-13-212605-2. Advanced undergraduate / first-year graduate text inspired by Milnor.
- Hempel, John (1976) 3-Manifolds. Princeton University Press. ISBN 0-8218-3695-1.
- Hirsch, Morris, (1997) Differential Topology. Springer Verlag. ISBN 0-387-90148-5. The most complete account, with historical insights and excellent, but difficult, problems. The standard reference for those wishing to have a deep understanding of the subject.
- Kirby, Robion C. and Siebenmann, Laurence C. (1977) Foundational Essays on Topological Manifolds. Smoothings, and Triangulations. Princeton University Press. ISBN 0-691-08190-5. A detailed study of the category of topological manifolds.
- Lee, John M. (2000) Introduction to Topological Manifolds. Springer-Verlag. ISBN 0-387-98759-2. Detailed and comprehensive first-year graduate text.
- Lee, John M. (2003) Introduction to Smooth Manifolds. Springer-Verlag. ISBN 0-387-95495-3. Detailed and comprehensive first-year graduate text; sequel to Introduction to Topological Manifolds.
- Massey, William S. (1977) Algebraic Topology: An Introduction. Springer-Verlag. ISBN 0-387-90271-6.
- Milnor, John (1997) Topology from the Differentiable Viewpoint. Princeton University Press. ISBN 0-691-04833-9. Classic brief introduction to differential topology.
- Munkres, James R. (1991) Analysis on Manifolds. Addison-Wesley (reprinted by Westview Press) ISBN 0-201-51035-9. Undergraduate text treating manifolds in .
- Munkres, James R. (2000) Topology. Prentice Hall. ISBN 0-13-181629-2.
- Neuwirth, L. P., ed. (1975) Knots, Groups, and 3-Manifolds. Papers Dedicated to the Memory of R. H. Fox. Princeton University Press. ISBN 978-0-691-08170-0.
- Riemann, Bernhard, Gesammelte mathematische Werke und wissenschaftlicher Nachlass, Sändig Reprint. ISBN 3-253-03059-8.
- Grundlagen für eine allgemeine Theorie der Functionen einer veränderlichen complexen Grösse. The 1851 doctoral thesis in which "manifold" (Mannigfaltigkeit) first appears.
- Ueber die Hypothesen, welche der Geometrie zu Grunde liegen. The 1854 Göttingen inaugural lecture (Habilitationsschrift).
- Spivak, Michael (1965) Calculus on Manifolds: A Modern Approach to Classical Theorems of Advanced Calculus. W.A. Benjamin Inc. (reprinted by Addison-Wesley and Westview Press). ISBN 0-8053-9021-9. Famously terse advanced undergraduate / first-year graduate text.
- Spivak, Michael (1999) A Comprehensive Introduction to Differential Geometry (3rd edition) Publish or Perish Inc. Encyclopedic five-volume series presenting a systematic treatment of the theory of manifolds, Riemannian geometry, classical differential geometry, and numerous other topics at the first- and second-year graduate levels.
- Tu, Loring W. (2011). An Introduction to Manifolds 2nd ed. New York: Springer. ISBN 978-1-4419-7399-3. Concise first-year graduate text.