Espaço tridimensional
Na geometria, um espaço tridimensional é um espaço matemático no qual três valores (chamados de coordenadas) são necessários para determinar a posição de um ponto. Alternativamente, pode ser referido como espaço 3D, 3-espaço ou espaço de três dimensões. Mais comumente, significa o espaço euclidiano tridimensional, isto é, o espaço euclidiano de dimensão três, que modela o espaço físico. Espaços tridimensionais mais gerais são chamados de 3-variedades. O termo pode referir-se coloquialmente a um subconjunto do espaço, uma região tridimensional (ou domínio 3D),[1] ou uma figura sólida.
Tecnicamente, uma ênupla de números pode ser entendida como as coordenadas cartesianas de uma localização num espaço euclidiano de dimensão . O conjunto destas -uplas é comumente denotado por e pode ser identificado com o par formado por um espaço euclidiano de dimensão e um sistema de coordenadas cartesianas. Quando , este espaço é chamado de espaço euclidiano tridimensional (ou simplesmente "espaço euclidiano" quando o contexto é claro).[2] Na física clássica, serve como um modelo do universo físico, no qual toda a matéria conhecida existe. Quando a teoria da relatividade é considerada, ele pode ser tido como um subespaço local do espaço-tempo.[3] Embora este espaço continue a ser a forma mais amplamente utilizada para modelar o mundo tal como é experienciado,[4] ele é apenas um exemplo de uma 3-variedade. Neste exemplo clássico, quando os três valores se referem a medições em diferentes direções (coordenadas), quaisquer três direções podem ser escolhidas, desde que estas direções não se situem no mesmo plano. Além disso, se estas direções forem perpendiculares duas a duas, os três valores são frequentemente rotulados pelos termos largura, altura/profundidade e comprimento.



História
O filósofo Aristóteles reconheceu a existência de três dimensões:
Uma magnitude, se divisível de uma forma, é uma linha; se de duas formas, uma superfície; e se de três, um corpo. Além destas não há outra magnitude, porque as três dimensões são tudo o que existe, e aquilo que é divisível em três direções é divisível em todas.[5]
Os livros XI a XIII d'Os Elementos de Euclides trataram da geometria tridimensional. O Livro XI desenvolve noções de perpendicularidade, paralelismo e ortogonalidade de retas e planos, a construção e propriedades de ângulos, e sólidos paralelepipédicos. O Livro XII discute os infinitesimais e o método da exaustão para encontrar a área de um círculo ou o volume de uma pirâmide,[6] cone, cilindro ou esfera.[7] O Livro XIII descreve a construção dos cinco sólidos platônicos regulares numa esfera, cobrindo o cubo, os octaedros, os icosaedros e os dodecaedros.[6]
No século XVII, o espaço tridimensional foi descrito com coordenadas cartesianas, com o advento da geometria analítica desenvolvida por René Descartes na sua obra La Géométrie.[8] Pierre de Fermat desenvolveu de forma independente ideias semelhantes no manuscrito Ad locos planos et solidos isagoge (Introdução aos Lugares Planos e Sólidos), que não foi publicado durante a vida de Fermat.[9] O trabalho de Fermat na busca de extremos de uma curva lançaria as bases para o cálculo diferencial.[10] Isaac Newton introduziu o sistema de coordenadas polares como um sistema não cartesiano alternativo que é útil para certas geometrias.[11]
No século XVIII, Alexis Clairaut estudou as curvas algébricas no espaço, o conceito de espaço tangente e curvatura, e o uso do cálculo para esse fim.[12][13] Leonhard Euler estudou a noção de uma geodésica numa superfície, derivando a primeira equação geodésica analítica,[14] e posteriormente introduziu o primeiro conjunto de sistemas de coordenadas intrínsecas numa superfície,[13] iniciando a teoria da geometria intrínseca, sobre a qual se baseiam as ideias geométricas modernas. Em 1760, Euler provou um teorema que expressa a curvatura de uma curva espacial numa superfície em termos das curvaturas principais,[15] conhecido como teorema de Euler. Mais tarde no mesmo século, Gaspard Monge fez contribuições importantes para o estudo de curvas e superfícies no espaço.[13] O trabalho de Euler e Monge lançou as bases para a geometria diferencial.
No século XIX, desenvolvimentos na geometria do espaço tridimensional surgiram com a formulação dos quaterniões por William Rowan Hamilton, um sistema de números hipercomplexos. Para este fim, Hamilton cunhou os termos escalar e vetor, e eles foram definidos pela primeira vez no sentido tridimensional dentro da sua estrutura geométrica para os quaterniões.[16] O espaço tridimensional poderia então ser descrito por quaterniões que possuíam uma componente escalar nula, isto é, .[17]


Embora não tenha sido explicitamente estudado por Hamilton, este trabalho introduziu indiretamente noções de base, aqui dadas pelos elementos do quaternião , bem como o produto escalar e o produto vetorial, que correspondem (ao negativo) da parte escalar e da parte vetorial do produto de dois quaterniões vetoriais. Foi apenas com Josiah Willard Gibbs que esses dois produtos foram identificados por direito próprio,[17] e a notação moderna para os produtos escalar e vetorial foi introduzida nas suas notas de ensino em sala de aula, encontradas também no livro didático de 1901 Vector Analysis, escrito por Edwin Bidwell Wilson com base nas palestras de Gibbs.[18]

Um desenvolvimento adicional ocorreu no formalismo abstrato dos espaços vetoriais, com o trabalho de Hermann Grassmann e Giuseppe Peano, este último tendo dado pela primeira vez a definição moderna de espaços vetoriais como uma estrutura algébrica.[19] O desenvolvimento da matemática matricial e a sua aplicação à geometria -dimensional foram feitos por Arthur Cayley.[20]
Na geometria euclidiana
Sistemas de coordenadas
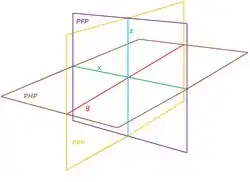
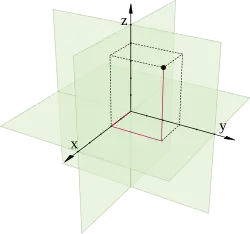
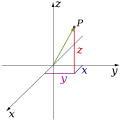
Na matemática, a geometria analítica (também chamada de geometria cartesiana) descreve cada ponto no espaço tridimensional por meio de três coordenadas. São dados três eixos de coordenadas, cada um perpendicular aos outros dois na origem, o ponto em que se cruzam. Eles são geralmente rotulados como , e . Em relação a esses eixos, a posição de qualquer ponto no espaço tridimensional é dada por uma tripla ordenada de números reais, cada número dando a distância daquele ponto até a origem medida ao longo do eixo dado, que é igual à distância daquele ponto até o plano determinado pelos outros dois eixos.[21]



Outros métodos populares para descrever a localização de um ponto no espaço tridimensional incluem as coordenadas cilíndricas e as coordenadas esféricas, embora haja um número infinito de métodos possíveis.[22][23] Para mais, veja Espaço euclidiano.
Abaixo estão imagens dos sistemas mencionados acima.

.svg.png)
Retas e planos
Dois pontos distintos sempre determinam uma reta. Três pontos distintos ou são colineares ou determinam um único plano. Por outro lado, quatro pontos distintos podem ser colineares, coplanares ou determinar todo o espaço.[24]
Duas retas distintas podem se interceptar, ser paralelas ou ser reversas. Duas retas paralelas, ou duas retas concorrentes, situam-se em um único plano, portanto, retas reversas são retas que não se encontram e não estão em um plano comum.[25]
Dois planos distintos podem se encontrar em uma reta comum ou ser paralelos (ou seja, não se encontram).[25] Três planos distintos, nenhum par dos quais seja paralelo, podem se encontrar em uma reta comum, encontrar-se em um único ponto comum ou não ter nenhum ponto em comum. No último caso, as três retas de interseção de cada par de planos são mutuamente paralelas.[26]
Uma reta pode estar contida em um plano dado, interceptar esse plano em um único ponto ou ser paralela ao plano.[25] No último caso, retas podem ser formadas no plano que são paralelas à reta dada.
Um hiperplano é um subespaço de uma dimensão a menos que a dimensão do espaço total. Os hiperplanos de um espaço tridimensional são os subespaços bidimensionais, ou seja, os planos. Em termos de coordenadas cartesianas, os pontos de um hiperplano satisfazem uma única equação linear, de modo que os planos neste espaço 3D são descritos por equações lineares. Uma reta pode ser descrita por um par de equações lineares independentes — cada uma representando um plano que tem essa reta como uma interseção comum.[27]
O teorema de Varignon afirma que os pontos médios de qualquer quadrilátero em formam um paralelogramo e, portanto, são coplanares.[28]

Esferas e bolas
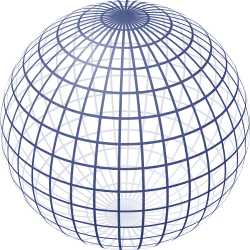
Uma esfera no espaço 3D (também chamada de 2-esfera porque é um objeto bidimensional) consiste no conjunto de todos os pontos no espaço 3D a uma distância fixa de um ponto central . O sólido delimitado pela esfera é chamado de bola (ou, mais precisamente, uma 3-bola).[29]


O volume da bola é dado por[30] e a área da superfície da esfera é[30]


Outro tipo de esfera surge de uma 4-bola, cuja superfície tridimensional é a 3-esfera: pontos equidistantes à origem do espaço euclidiano . Se um ponto tem coordenadas , então caracteriza esses pontos na 3-esfera unitária centrada na origem.[31]



Esta 3-esfera é um exemplo de uma 3-variedade: um espaço que 'se parece localmente' com o espaço 3D.[32] Em termos topológicos precisos, cada ponto da 3-esfera tem uma vizinhança que é homeomorfa a um subconjunto aberto do espaço 3D.
Politopos
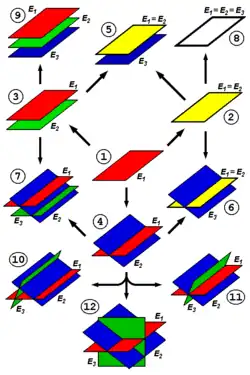
Em três dimensões, existem nove politopos regulares: os cinco sólidos platônicos convexos e os quatro poliedros de Kepler-Poinsot não convexos.[33]
| Classe | Sólidos platônicos | Poliedros de Kepler-Poinsot | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Simetria | Td | Oh | Ih | ||||||
| Grupo de Coxeter | A3, [3,3] | B3, [4,3] | H3, [5,3] | ||||||
| Ordem | 24 | 48 | 120 | ||||||
| Poliedro regular |
{3,3} |
 {4,3} |
 {3,4} |
 {5,3} |
{3,5} |
 {5/2,5} |
 {5,5/2} |
{5/2,3} |
 {3,5/2} |
Superfícies de revolução
Uma superfície gerada pela revolução de uma curva plana em torno de uma reta fixa em seu plano como eixo é chamada de superfície de revolução. A curva plana é chamada de geratriz da superfície. Uma seção da superfície, feita pela interseção da superfície com um plano que é perpendicular (ortogonal) ao eixo, é um círculo.[34][35]
Exemplos simples ocorrem quando a geratriz é uma reta. Se a reta geratriz intercepta a reta do eixo, a superfície de revolução é um cone circular reto com o vértice (ápice) no ponto de interseção. No entanto, se a geratriz e o eixo forem paralelos, então a superfície de revolução é um cilindro circular.[34][35]
Superfícies quádricas
Em analogia com as seções cônicas, o conjunto de pontos cujas coordenadas cartesianas satisfazem a equação geral do segundo grau, a saber, onde e são números reais e nem todos os e são zero, é chamado de superfície quádrica (ou simplesmente quádrica).[36]





Existem seis tipos de superfícies quádricas não degeneradas:[36]
- Elipsoide
- Hiperboloide de uma folha
- Hiperboloide de duas folhas
- Cone elíptico
- Paraboloide elíptico
- Paraboloide hiperbólico
As superfícies quádricas degeneradas são o conjunto vazio, um único ponto, uma única reta, um único plano, um par de planos ou um cilindro quadrático (uma superfície que consiste em uma seção cônica não degenerada em um plano e todas as retas de através dessa cônica que são normais a ).[36] Os cones elípticos às vezes também são considerados superfícies quádricas degeneradas.[carece de fontes]

Tanto o hiperboloide de uma folha quanto o paraboloide hiperbólico são superfícies regradas, o que significa que podem ser formados por uma família de retas. De fato, cada um possui duas famílias de retas geradoras, os membros de cada família são disjuntos e cada membro de uma família intercepta, com apenas uma exceção, todos os membros da outra família.[36] Cada família é chamada de regulus.[37]
Na álgebra linear
Na álgebra linear, a perspectiva do espaço tridimensional é crucialmente dependente do conceito de independência. O espaço tem três dimensões porque o comprimento de uma caixa (ou paralelepípedo retângulo) é independente da sua largura ou altura. Na linguagem técnica da álgebra linear, o espaço é tridimensional porque cada ponto no espaço pode ser descrito por uma combinação linear de três vetores independentes.[38]
Produto escalar, ângulo e comprimento
Um vetor pode ser imaginado como uma seta. A magnitude do vetor é o seu comprimento, e a sua direção é a direção para a qual a seta aponta. Um vetor em pode ser representado por um terno ordenado (ou tripla ordenada) de números reais. Esses números são chamados de componentes do vetor.
O produto escalar de dois vetores e é definido como:[39]
![{\displaystyle \mathbf {A} =[A_{1},A_{2},A_{3}]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/9884089ae7238e2161b42c82d92b432b4b650fba.svg)
![{\displaystyle \mathbf {B} =[B_{1},B_{2},B_{3}]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/7f0cdf303a79778bca78d252bbae8e981cc3b05d.svg)

A magnitude de um vetor é denotada por . O produto escalar de um vetor por si mesmo é



o que fornece[39]

a fórmula para o comprimento euclidiano do vetor.
Sem fazer referência às componentes dos vetores, o produto escalar de dois vetores euclidianos não nulos e é dado por[39]


onde é o ângulo entre e .

Para um exemplo físico, considere um bloco num plano inclinado que está sendo puxado para baixo por uma força gravitacional. O produto escalar pode ser usado para calcular o trabalho realizado pelo vetor força constante que é aplicado a um ângulo em relação à direção do movimento encosta abaixo . Ou seja:[40]




Produto vetorial
O produto vetorial é uma operação binária sobre dois vetores no espaço euclidiano tridimensional e é denotado pelo símbolo . O produto vetorial dos vetores e é um vetor que é perpendicular a ambos e, portanto, normal ao plano que os contém. Ele tem muitas aplicações na matemática, na física e na engenharia.[41] Por exemplo, pode ser usado para calcular a quantidade de torque num parafuso sendo girado por uma chave de boca, ou a força de Lorentz sobre um elétron que viaja através de um campo magnético.[42]


Na linguagem de funções, o produto vetorial é uma função .[43]

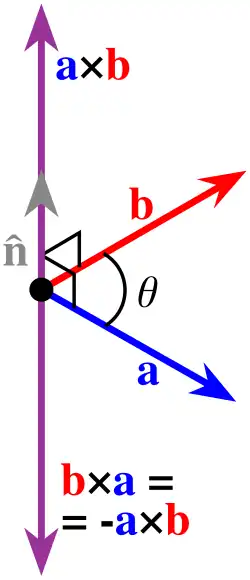
As componentes do produto vetorial são e também podem ser escritas em componentes, usando a convenção de soma de Einstein, como , onde é o símbolo de Levi-Civita.[44] Ele tem a propriedade de que .[41]
![{\displaystyle \mathbf {A} \times \mathbf {B} =[A_{2}B_{3}-B_{2}A_{3},A_{3}B_{1}-B_{3}A_{1},A_{1}B_{2}-B_{1}A_{2}]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/a586a3bca8700c41c66803055590a4ff5fd15326.svg)



A sua magnitude está relacionada com o ângulo entre e pela identidade[41]

O espaço e o produto formam uma álgebra sobre um corpo, que não é comutativa nem associativa, mas é uma álgebra de Lie com o produto vetorial sendo o colchete de Lie.[45] Especificamente, o espaço juntamente com o produto, , é isomorfo à álgebra de Lie das rotações tridimensionais, denotada por .[43] A fim de satisfazer os axiomas de uma álgebra de Lie, em vez da associatividade, o produto vetorial satisfaz a identidade de Jacobi. Para quaisquer três vetores e [45]





Pode-se, em n dimensões, tomar o produto de vetores para produzir um vetor perpendicular a todos eles. Mas se o produto se limitar a produtos binários não triviais com resultados vetoriais, ele existe apenas em três e sete dimensões.[46]

Descrição abstrata
Pode ser útil descrever o espaço tridimensional como um espaço vetorial tridimensional sobre os números reais. Isso difere de de uma maneira sutil. Por definição, existe uma base para . Isso corresponde a um isomorfismo entre e :[38] a construção para o isomorfismo é encontrada aqui. No entanto, não há 'base preferencial' ou 'base canônica' para .


Por outro lado, há uma base preferencial para , que se deve à sua descrição como um produto cartesiano de cópias de , isto é, , o espaço euclidiano tridimensional.[47] Isso permite a definição de projeções canônicas, , onde . Por exemplo, . Isso então permite a definição da base padrão (ou base canônica) definida por onde é o delta de Kronecker. Escrita por extenso, a base padrão é[48]









Portanto, pode ser visto como o espaço vetorial abstrato, juntamente com a estrutura adicional de uma escolha de base. Reciprocamente, pode ser obtido começando com e 'esquecendo' a estrutura de produto cartesiano, ou equivalentemente, a escolha de base padrão.
Em oposição a um espaço vetorial geral , o espaço é às vezes referido como um espaço de coordenadas.[49]
Fisicamente, é conceitualmente desejável usar o formalismo abstrato a fim de assumir a menor estrutura possível se esta não for dada pelos parâmetros de um problema específico. Por exemplo, num problema com simetria rotacional, trabalhar com a descrição mais concreta do espaço tridimensional pressupõe uma escolha de base, correspondendo a um conjunto de eixos. Mas na simetria rotacional, não há razão para que um conjunto de eixos seja preferido em relação, digamos, ao mesmo conjunto de eixos que tenha sido rodado arbitrariamente. Dito de outra forma, uma escolha preferencial de eixos quebra a simetria rotacional do espaço físico.
Computacionalmente, é necessário trabalhar com a descrição mais concreta a fim de fazer cálculos concretos.
Descrição afim
Uma descrição ainda mais abstrata é modelar o espaço físico como um espaço afim tridimensional sobre os números reais. Ele é único a menos de um isomorfismo afim. É por vezes referido como espaço euclidiano tridimensional.[50] Assim como a descrição do espaço vetorial veio de "esquecer a base preferencial" de , a descrição do espaço afim vem de "esquecer a origem" do espaço vetorial. Os espaços euclidianos são por vezes chamados de espaços afins euclidianos para os distinguir dos espaços vetoriais euclidianos.[51]

Isso é fisicamente atraente, pois torna a invariância de translação do espaço físico manifesta. Uma origem preferencial quebra a invariância translacional.[50]
Espaço com produto interno
A discussão acima não envolve o produto escalar. O produto escalar é um exemplo de um produto interno. O espaço físico pode ser modelado como um espaço vetorial que tem adicionalmente a estrutura de um produto interno. O produto interno define noções de comprimento e ângulo (e, portanto, em particular, a noção de ortogonalidade).[52] Para qualquer produto interno, existem bases sob as quais o produto interno concorda com o produto escalar,[carece de fontes] mas, novamente, há muitas bases possíveis diferentes, nenhuma das quais é preferencial. Elas diferem umas das outras por uma rotação, um elemento do grupo das rotações SO(3).
No cálculo
O cálculo vetorial preocupa-se com as mudanças infinitesimais e cumulativas em campos vetoriais, principalmente no espaço euclidiano tridimensional, . Para a diferenciação, utiliza-se o operador del (), ou nabla.

Gradiente, divergente e rotacional
O gradiente indica a direção de maior aumento de uma função e a sua magnitude. Um exemplo é um fluxo de partículas, em que o gradiente é a magnitude e a direção do fluxo num determinado local.[53] Num sistema de coordenadas retangulares, o gradiente de uma função diferenciável é dado por[54]


onde i, j e k são os vetores unitários para os eixos x, y e z, respectivamente. Na notação de índices, escreve-se[55]

O divergente indica o fluxo líquido de um campo vetorial em torno de um ponto, tal como um aumento ou diminuição da densidade de partículas. Ou seja, se o local é uma fonte ou um sumidouro.[56] O divergente de um campo vetorial (diferenciável) F = U i + V j + W k, isto é, uma função , é igual à função de valor escalar:[54]


Na notação de índices, com a convenção de soma de Einstein, isto é[55]

O rotacional (ou rotor) é um vetor que indica a circulação rotacional de um campo vetorial. Expandido em coordenadas cartesianas (veja Nabla em coordenadas cilíndricas e esféricas para representações de coordenadas esféricas e cilíndricas), o rotacional ∇ × F é, para um F composto por [Fx, Fy, Fz]:[57]

Isto expande-se da seguinte forma:[54]

Na notação de índices, com a convenção de soma de Einstein, isto é[55] onde é o símbolo totalmente antissimétrico, o símbolo de Levi-Civita.


Integrais de linha, de superfície e de volume
Uma integral de linha de uma função ao longo de uma curva pode ser pensada como uma soma contínua do valor da função ao longo de cada incremento infinitesimal dessa curva. Para um campo escalar f : U ⊆ Rn → R, a integral de linha ao longo de uma curva suave por partes C ⊂ U é definida como[58]

onde r: [a, b] → C é uma parametrização bijetiva (correspondência biunívoca) arbitrária da curva C tal que r(a) e r(b) fornecem as extremidades de C e .

Para um campo vetorial F : U ⊆ Rn → Rn, a integral de linha ao longo de uma curva suave por partes C ⊂ U, na direção de r, é definida como[58]

onde é o produto escalar e r: [a, b] → C é uma parametrização bijetiva da curva C tal que r(a) e r(b) fornecem as extremidades de C. Um subtipo de integral de linha encontrado na física é o laço fechado plano, que determina a circulação da função em torno do laço[59]


Uma integral de superfície é uma generalização das integrais múltiplas para a integração sobre superfícies. Pode ser pensada como o análogo em integral dupla da integral de linha. Para encontrar uma fórmula explícita para a integral de superfície, precisamos parametrizar a superfície de interesse, S, considerando um sistema de coordenadas curvilíneas em S, como a latitude e a longitude numa esfera. Seja tal parametrização x(s, t), onde (s, t) varia em alguma região T no plano. Então, a integral de superfície é dada por

onde a expressão entre barras do lado direito é a magnitude do produto vetorial das derivadas parciais de x(s, t), e é conhecida como o elemento de superfície. Dado um campo vetorial v em S, isto é, uma função que atribui a cada x em S um vetor v(x), a integral de superfície pode ser definida componente por componente de acordo com a definição da integral de superfície de um campo escalar; o resultado é um vetor.
Uma integral de volume é uma integral sobre um domínio ou região tridimensional. Quando o integrando é trivial (unidade), a integral de volume é simplesmente o volume da região.[60][1] Também pode significar uma integral tripla dentro de uma região D em R3 de uma função e é geralmente escrita como:


Teorema fundamental das integrais de linha
O teorema do gradiente (ou teorema fundamental das integrais de linha) afirma que uma integral de linha através de um campo gradiente pode ser avaliada avaliando-se o campo escalar original nas extremidades da curva.[61]
Seja . Então

![{\displaystyle \varphi \left(\mathbf {q} \right)-\varphi \left(\mathbf {p} \right)=\int _{\gamma [\mathbf {p} ,\,\mathbf {q} ]}\nabla \varphi (\mathbf {r} )\cdot d\mathbf {r} .}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/b27cdd0377931a70cbb0635e37781a42e7fe33f9.svg)
Teorema de Stokes
O teorema de Stokes relaciona a integral de superfície do rotacional de um campo vetorial F sobre uma superfície Σ no espaço tridimensional euclidiano à integral de linha do campo vetorial sobre a sua fronteira ∂Σ:[62]

Teorema da divergência
Suponha que V seja um subconjunto de (no caso de , V representa um volume no espaço 3D) que é compacto e tem uma fronteira suave por partes S (também indicada com ∂V = S). Se F for um campo vetorial continuamente diferenciável definido numa vizinhança de V, então o teorema da divergência (ou teorema de Gauss) afirma que:[63]




O lado esquerdo é uma integral de volume sobre o volume V, o lado direito é a integral de superfície sobre a fronteira do volume V. A variedade fechada ∂V é muito geralmente a fronteira de V orientada por normais que apontam para fora, e n é o campo normal unitário da fronteira ∂V que aponta para fora. (dS pode ser usado como uma abreviatura para n dS).
Na topologia

O espaço tridimensional possui várias propriedades topológicas que o distinguem de espaços com outros números de dimensões. Por exemplo, são necessárias pelo menos três dimensões para amarrar um nó num pedaço de corda.[64]
Na geometria diferencial, os espaços tridimensionais genéricos são as 3-variedades, que se assemelham localmente a . Globalmente, a mesma 3-variedade pode curvar-se de diversas maneiras, desde que permaneça contínua.[65] Um exemplo disto é o espaço-tempo curvo encontrado na relatividade geral.

Na geometria finita
Muitas ideias de dimensão podem ser testadas com a geometria finita. A instância mais simples é o espaço PG(3,2), que tem planos de Fano como os seus subespaços bidimensionais.[66] É uma instância da geometria de Galois, um estudo da geometria projetiva usando corpos finitos. Assim, para qualquer corpo de Galois , existe um espaço projetivo de três dimensões.[67] Por exemplo, quaisquer três retas reversas em estão contidas em exatamente um regulus.[68]


Ver também
- Espaço bidimensional
- Espaço quadridimensional
Notas
- [nota 1] ^ A palavra espaço vem do latim (spatìum,ìí) e significa extensão, distância e intervalo. Dimensão do latim (mensìo,ónis) significa medida.
- [nota 2] ^ No espaço bidimensional seria improdutivo a criação de um sistema projetivo, porque todos os entes geométricos se reduziriam a pontos e retas, de acordo com um observador (que necessariamente estaria presente no plano). Para que exista um sistema de projeções é necessário que se tenha um observador (fora do plano), um plano de projeção e algo para ser observado (o elemento observado pode coincidir com o plano de projeção), mas não pode coincidir com o observador.
Referências
- 1 2 «IEC 60050 — Details for IEV number 102-04-39: "three-dimensional domain"». International Electrotechnical Vocabulary (em japonês). Consultado em 19 de setembro de 2023
- ↑ «Euclidean space - Encyclopedia of Mathematics». encyclopediaofmath.org (em inglês). Consultado em 12 de agosto de 2020
- ↑ «Details for IEV number 113-01-02: "space"». International Electrotechnical Vocabulary (em japonês). Consultado em 7 de novembro de 2023
- ↑ «Euclidean space | geometry». Encyclopedia Britannica (em inglês). Consultado em 12 de agosto de 2020
- ↑ Aristóteles (350 a.C.), De Caelo (título em latim), Livro 1, traduzido por Stocks, J. L., publicado em 1922
- 1 2 Artmann, Benno (2012). Euclid—The Creation of Mathematics. [S.l.]: Springer Science & Business Media. pp. 9–10. ISBN 978-1-4612-1412-0
- ↑ Fitzpatrick, Richard (26 de agosto de 2014). «Euclid's Elements of Geometry». University of Texas. Consultado em 4 de novembro de 2025. Cópia arquivada em 22 de novembro de 2025
- ↑ Martin, G. E. (2012). The Foundations of Geometry and the Non-Euclidean Plane. Col: Mathematics and Statistics. [S.l.]: Springer Science & Business Media. p. 51. ISBN 978-1-4612-5725-7
- ↑ Holton, Derek Allan; Stillwell, John (2024). Relay Race To Infinity, The: Developments In Mathematics From Euclid To Fermat. [S.l.]: World Scientific. p. 158. ISBN 978-981-12-9634-5
- ↑ J.-B. Hiriart-Urrety (2012). «Mathematical Faits Divers». In: Jacob Ponstein. Convexity and Duality in Optimization: Proceedings of the Symposium on Convexity and Duality in Optimization Held at the University of Groningen, The Netherlands June 22, 1984. Col: Lecture Notes in Economics and Mathematical Systems (em inglês). [S.l.]: Springer Science & Business Media. p. 3. ISBN 978-3-642-45610-7
- ↑ Boyer, C. B. (fevereiro de 1949). «Newton as an Originator of Polar Coördinates». Taylor & Francis, Ltd. The American Mathematical Monthly. 56 (2): 73-78. JSTOR 2306162. doi:10.2307/2306162
- ↑ Kiral, Taner; et al. «The Four Curves of Alexis Clairaut». Convergence. Mathematical Association of America. Consultado em 5 de novembro de 2025
- 1 2 3 Struik, D. J. (abril de 1933). «Outline of a History of Differential Geometry: I». The University of Chicago Press. Isis. 19 (1): 92–120. JSTOR 225188
- ↑ Calinger, Ronald (2019). Leonhard Euler: Mathematical Genius in the Enlightenment. [S.l.]: Princeton University Press. p. 76. ISBN 978-0-691-19640-4
- ↑ Debnath, Lokenath (2010). The Legacy of Leonhard Euler: A Tricentennial Tribute. [S.l.]: World Scientific. p. 137. ISBN 978-1-84816-526-7
- ↑ Adrian Rice (2011). «Introduction». In: Raymond Flood; Adrian Rice; Robin Wilson. Mathematics in Victorian Britain (em inglês). [S.l.]: OUP Oxford. p. 5. ISBN 978-0-19-960139-4
- 1 2 Morais, João Pedro; et al. (2014). Real Quaternionic Calculus Handbook. [S.l.]: Springer Science & Business Media. pp. 1–13. ISBN 978-3-0348-0622-0
- ↑ Gibbs, Josiah Willard; Wilson, Edwin Bidwell (1901). Vector Analysis: A Text-book for the Use of Students of Mathematics and Physics. Col: Yale bicentennial publications 2nd ed. [S.l.]: Yale University Press. pp. ix, 55
- ↑ Shifrin, Theodore; Adams, Malcolm (2002). Linear Algebra: A Geometric Approach. [S.l.]: W. H. Freeman & Company. p. 215. ISBN 978-0-7167-4337-8
- ↑ O'Connor, J. J.; Robertson, E. F. (novembro de 2014). «Arthur Cayley». MacTutor. School of Mathematics and Statistics, University of St Andrews, Scotland. Consultado em 5 de novembro de 2025
- ↑ Hughes-Hallett, Deborah; McCallum, William G.; Gleason, Andrew M. (2013). Calculus : Single and Multivariable 6 ed. [S.l.]: John wiley. ISBN 978-0470-88861-2
- ↑ Fleisch, Daniel A. (2011). A Student's Guide to Vectors and Tensors. Col: Student's Guides. [S.l.]: Cambridge University Press. pp. 15–18. ISBN 978-1-139-50394-5
- ↑ Harris, Frank E. (2014). Mathematics for Physical Science and Engineering: Symbolic Computing Applications in Maple and Mathematica. [S.l.]: Academic Press. pp. 202–205. ISBN 978-0-12-801049-5
- ↑ Sommerville, D. M. Y. (2020) [1929]. Introduction to the Geometry of N Dimensions. Col: Dover Books on Mathematics reprint ed. [S.l.]: Courier Dover Publications. pp. 3–6. ISBN 978-0-486-84248-6
- 1 2 3 Bronštejn, Ilja N.; Semendjaev, Konstantin A. (2013). Handbook of Mathematics 3rd ed. [S.l.]: Springer. p. 177. ISBN 978-3-662-25651-0
- ↑ Fenn, Roger (2012). Geometry. Col: Springer Undergraduate Mathematics Series. [S.l.]: Springer Science & Business Media. p. 152. ISBN 978-1-4471-0325-7
- ↑ Laos, Nicolas K. (1998). Topics in Mathematical Analysis and Differential Geometry. Col: Pure Mathematics. 24. [S.l.]: World Scientific. pp. 220–221. ISBN 978-981-02-3180-4
- ↑ Ostermann, Alexander; Wanner, Gerhard (2012). Geometry by Its History. Col: Undergraduate Texts in Mathematics. [S.l.]: Springer Science & Business Media. ISBN 978-3-642-29163-0
- ↑ Cannon, James W. (2017). Geometry of Lengths, Areas, and Volumes. 108. [S.l.]: American Mathematical Society. p. 29. ISBN 978-1-4704-3714-5
- 1 2 Sue Johnston-Wilder; John Mason, eds. (2005). Developing Thinking in Geometry (em inglês). [S.l.]: Paul Chapman Educational Publishing. p. 106. ISBN 978-1-4129-1169-6
- ↑ Weisstein, Eric W. «Hypersphere». Wolfram MathWorld. Consultado em 6 de novembro de 2025. Cópia arquivada em 2 de fevereiro de 2026
- ↑ O'Rourke, Joseph; Devadoss, Satyan L. (2011). Discrete and Computational Geometry. [S.l.]: Princeton University Press. ISBN 978-1-4008-3898-1
- ↑ Barnes, John (2012). Gems of Geometry 2nd ed. [S.l.]: Springer Science & Business Media. p. 46. ISBN 978-3-642-30964-9
- 1 2 Caliò, Franca; Lazzari, Alessandro (2020). Elements of Mathematics with numerical applications. [S.l.]: Società Editrice Esculapio. pp. 149–151. ISBN 978-88-358-1755-0
- 1 2 Parker, Wilford Oren (1987). Sceno-graphic Techniques. [S.l.]: SIU Press. pp. 74–76. ISBN 978-0-8093-1350-1
- 1 2 3 4 Brannan, David A.; et al. (2011). Geometry 2nd, revised ed. [S.l.]: Cambridge University Press. pp. 42–43, 48–52. ISBN 978-1-139-50370-9
- ↑ Cayley, Arthur (1896). The Collected Mathematical Papers of Arthur Cayley. 11. [S.l.]: Cambridge University Press. p. 633
- 1 2 Towers, David A. (1988). Guide to Linear Algebra. Col: Mathematical Guides. [S.l.]: Bloomsbury Publishing. pp. 6–8. ISBN 978-1-349-09318-2
- 1 2 3 Williams, Gareth (2007). Linear Algebra with Applications. [S.l.]: Jones & Bartlett Publishing. pp. 38–40. ISBN 978-0-7637-5753-3
- ↑ Zill, Dennis G.; Wright, Warren S. (2009). Advanced Engineering Mathematics 4th ed. [S.l.]: Jones & Bartlett Publishers. p. 311. ISBN 978-0-7637-8241-2
- 1 2 3 Rogawski, Jon (2007). Multivariable Calculus. [S.l.]: Macmillan. pp. 684–686. ISBN 978-1-4292-1069-0
- ↑ Simmonds, J. G. (2012). A Brief on Tensor Analysis. Col: Undergraduate Texts in Mathematics. [S.l.]: Springer Science & Business Media. p. 11. ISBN 978-1-4684-0141-7
- 1 2 Woit, Peter (2017). Quantum Theory, Groups and Representations: An Introduction. [S.l.]: Springer. pp. 73–75. ISBN 978-3-319-64612-1
- ↑ Cheng, Ta-Pei (2013). Einstein's Physics: Atoms, Quanta, and Relativity – Derived, Explained, and Appraised. [S.l.]: OUP Oxford. ISBN 978-0-19-164877-9
- 1 2 Quillen, Daniel G.; Blower, Gordon (2020). Topics in Cyclic Theory. Col: London Mathematical Society Student Texts. 97. [S.l.]: Cambridge University Press. ISBN 978-1-108-85955-4
- ↑ Massey, W. S. (1983). «Cross products of vectors in higher dimensional Euclidean spaces». The American Mathematical Monthly. 90 (10): 697–701. JSTOR 2323537. doi:10.2307/2323537.
If one requires only three basic properties of the cross product ... it turns out that a cross product of vectors exists only in 3-dimensional and 7-dimensional Euclidean space.
- ↑ Bray, Clark; et al. (2021). Algebraic Topology. [S.l.]: Springer Nature. p. 2. ISBN 978-3-030-70608-1
- ↑ Szabo, Fred (2000). Linear Algebra with Mathematica: An Introduction Using Mathematica. [S.l.]: Academic Press. pp. 267–268. ISBN 978-0-12-680135-4
- ↑ Kaczynski, Tomasz; et al. (2006). Computational Homology. Col: Applied Mathematical Sciences. 157. [S.l.]: Springer Science & Business Media. p. 429. ISBN 978-0-387-21597-6
- 1 2 Moretti, Valter (2023). Analytical Mechanics: Classical, Lagrangian and Hamiltonian Mechanics, Stability Theory, Special Relativity. Traduzido por Chiossi, Simon G. [S.l.]: Springer Nature. pp. 2–7. ISBN 978-3-031-27612-5
- ↑ Vinberg, Ėrnest Borisovich (2003). A Course in Algebra. Col: Graduate studies in mathematics. 56. [S.l.]: American Mathematical Society. pp. 239–247. ISBN 978-0-8218-3413-8
- ↑ Howland, R. A. (2006). Intermediate Dynamics: A Linear Algebraic Approach. Col: Mechanical Engineering Series. [S.l.]: Springer Science & Business Media. pp. 49–51. ISBN 978-0-387-28316-6
- ↑ Allen, Jont (2020). An Invitation to Mathematical Physics and Its History. [S.l.]: Springer Nature. pp. 239–240. ISBN 978-3-030-53759-3
- 1 2 3 Sussman, Gerald Jay; Wisdom, Jack (2025). Functional Differential Geometry. [S.l.]: MIT Press. p. 154. ISBN 978-0-262-05289-4
- 1 2 3 Bedford, Anthony; Drumheller, Douglas S. (2023). Introduction to Elastic Wave Propagation 2nd ed. [S.l.]: Springer Nature. pp. 1–4. ISBN 978-3-031-32875-6
- ↑ Kulp, Christopher W.; Pagonis, Vasilis (2020). Classical Mechanics: A Computational Approach with Examples Using Mathematica and Python. [S.l.]: CRC Press. p. 92. ISBN 978-1-351-02437-2
- ↑ Matthews, Paul C. (2000). Vector Calculus. Col: Springer Undergraduate Mathematics Series. [S.l.]: Springer Science & Business Media. p. 60. ISBN 978-3-540-76180-8
- 1 2 Karpfinger, Christian (2022). Calculus and Linear Algebra in Recipes: Terms, phrases and numerous examples in short learning units. [S.l.]: Springer Nature. p. 640. ISBN 978-3-662-65458-3
- ↑ Durrant, Alan (2019). Vectors in Physics and Engineering. [S.l.]: Routledge. p. 225. ISBN 978-1-351-40556-0
- ↑ «IEC 60050 — Details for IEV number 102-04-40: "volume"». International Electrotechnical Vocabulary (em japonês). Consultado em 19 de setembro de 2023
- ↑ Knill, Oliver. «Lecture 25: Fundamental Theorem of Line Integrals» (PDF). Multivariable Calculus. Department of Mathematics, Harvard University. Consultado em 8 de novembro de 2025. Cópia arquivada (PDF) em 9 de novembro de 2023
- ↑ Evans, Martin (23 de abril de 2002). «Lecture 22: Stokes' Theorem and Applications» (PDF). The University of Edinburgh, Department of Physics & Astronomy. Consultado em 8 de novembro de 2025
- ↑ Spiegel, M. R.; Lipschutz, S.; Spellman, D. (2009). Vector Analysis. Col: Schaum's Outlines 2nd ed. US: McGraw Hill. ISBN 978-0-07-161545-7
- ↑ Rolfsen, Dale (1976). Knots and Links. Col: AMS Chelsea Publishing, 346. Providence, Rhode Island: American Mathematical Society. ISBN 978-0-8218-3436-7
- ↑ Papastavridis, John G. (2018). Tensor Calculus and Analytical Dynamics. Col: Engineering Mathematics. [S.l.]: Routledge. p. 22. ISBN 978-1-351-41162-2
- ↑ Ball, Simeon; Serra, Oriol (2024). A Course in Combinatorics and Graphs. Col: Compact Textbooks in Mathematics. [S.l.]: Springer Nature. p. 77. ISBN 978-3-031-55384-4
- ↑ P. J. Cameron; J. W. P. Hirschfeld; D. R. Hughes, eds. (1981). Introduction. Finite Geometries and Designs: Proceedings of the Second Isle of Thorns Conference 1980. Lecture Note Series, London Mathematical Society (em inglês). 49. Cambridge University Press. p. 1. ISBN 978-0-521-28378-6
- ↑ Beutelspacher, Albrecht; Rosenbaum, Ute (1998). Projective Geometry. [S.l.]: Cambridge University Press. p. 72. ISBN 978-0-521-48364-3