Filtro de Wiener
Em processamento de sinais, o filtro de Wiener é um filtro usado para para produzir uma estimativa de um processo aleatório desejado por meio da filtragem linear e invariante no tempo (LIT) de um processo observado com ruído aditivo, assumindo-se conhecidos os espectros do sinal e do ruído. O filtro de Wiener minimiza o erro quadrático médio entre o processo aleatório estimado e o processo desejado.[1][2][3]
Descrição
O objetivo do filtro de Wiener é calcular uma estimativa estatística de um sinal desconhecido usando um sinal relacionado como entrada e filtrando-o para produzir essa estimativa. Por exemplo, o sinal conhecido pode consistir em um sinal de interesse desconhecido que foi corrompido por ruído aditivo. O filtro de Wiener pode ser usado para atenuar o ruído do sinal corrompido, fornecendo uma estimativa do sinal subjacente de interesse. O filtro de Wiener baseia-se em uma abordagem estatística, e uma descrição mais detalhada dessa teoria é apresentada, por exemplo, no verbete estimador de erro quadrático médio mínimo (MMSE).
Filtros determinísticos típicos são projetados para se obter uma resposta em frequência desejada. No entanto, o projeto do filtro de Wiener adota uma abordagem diferente. Assume-se que se tenha conhecimento das propriedades espectrais do sinal original e do ruído, e busca-se o filtro linear invariante no tempo cuja saída se aproxime o máximo possível do sinal original. Os filtros de Wiener são caracterizados pelo seguinte:[3][4]
- Hipótese: o sinal e o ruído aditivo são processos estocásticos estacionários, com características espectrais conhecidas ou com autocorrelação e correlação cruzada conhecidas
- Requisito: o filtro deve ser fisicamente realizável/causal (esse requisito pode ser dispensado, resultando em uma solução não causal)
- Critério de desempenho: erro quadrático médio mínimo (MMSE)
Este filtro é frequentemente usado no processo de deconvolução; para esta aplicação, veja Deconvolução de Wiener.
Soluções do filtro de Wiener
Seja um sinal desconhecido que deve ser estimado a partir de um sinal de medição , em que é um parâmetro ajustável. O caso corresponde à predição, corresponde à filtragem e corresponde à suavização (veja o capítulo sobre filtragem de Wiener em [4] para mais detalhes).






O filtro de Wiener possui soluções para três casos possíveis: (i) quando um filtro não causal é aceitável (o que exige uma quantidade infinita de dados tanto do passado quanto do futuro), (ii) quando se deseja um filtro causal (utilizando uma quantidade infinita de dados passados) e (iii) o caso de resposta ao impulso finita (FIR, do inglês Finite Impulse Response), em que apenas um trecho finito dos dados de entrada são usados (ou seja, o resultado ou a saída não é realimentada no filtro como no caso da IIR). O primeiro caso é simples de resolver, mas não é adequado para aplicações em tempo real. A principal realização de Wiener foi resolver o caso em que o requisito de causalidade é aplicado; Norman Levinson forneceu a solução da FIR em um apêndice do livro de Wiener[5].
Filtro não causal
Neste caso, a solução é dada por

onde são densidades espectrais. Desde que é ótimo, então a equação do erro quadrático médio mínimo se reduz a



e a solução é a transformada de Laplace bilateral inversa de .

Solução causal

Onde:
- consiste na parte causal de (ou seja, aquela parte desta fração que tem uma solução no tempo positiva sob a transformada inversa de Laplace)
- é o componente causal de (isto é, a transformada inversa de Laplace de é não nula apenas para )
- é o componente anti-causal de (isto é, a transformada inversa de Laplace de é não nula apenas para )







Esta fórmula geral é complicada e merece uma explicação mais detalhada. Para escrever a solução em um caso específico, deve-se seguir estes passos:[6]
- Comece com o espectro na forma racional e fatorize-o em componentes causais e anti-causais: onde contém todos os zeros e pólos no semiplano esquerdo (LHP) e contém os zeros e polos no semiplano direito (RHP). Isso é chamado de fatoração de Wiener-Hopf.
- Dividir por e escrever o resultado como uma expansão de fração parcial.
- Selecione apenas os termos desta expansão que possuem polos no lado esquerdo da equação. Chame esses termos de .
- Dividir por . O resultado é a função de transferência de filtro desejada .




Filtro de Wiener de resposta ao impulso finita para séries discretas
O filtro de Wiener de resposta ao impulso finito (FIR) causal, em vez de usar uma matriz de dados X e um vetor de saída Y fornecidos, encontra os coeficientes ótimos (pesos dos "taps") utilizando as estatísticas dos sinais de entrada e saída. Ele preenche a matriz de entrada X com estimativas da autocorrelação do sinal de entrada (T) e preenche o vetor de saída Y com estimativas da correlação cruzada entre os sinais de saída e entrada (V).
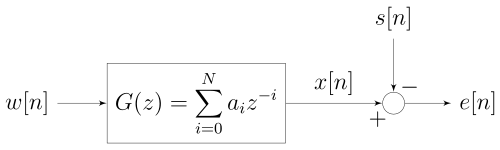
Para derivar os coeficientes do filtro de Wiener, considere o sinal w[n] sendo alimentado a um filtro de Wiener de ordem N (número de "taps" anteriores) e com coeficientes . A saída do filtro é denotada por x[n] que é dada pela expressão:

![{\displaystyle x[n]=\sum _{i=0}^{N}a_{i}w[n-i].}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/b52e807887e91ea452fcc1d5c0b8037593336d05.svg)
O erro residual é denotado por e [n] e é definido como e[n] = x[n] − s[n] (veja o diagrama de blocos correspondente). O filtro de Wiener é projetado para minimizar o erro quadrático médio (critérios MMSE), o qual pode ser expresso de forma concisa da seguinte maneira:
![{\displaystyle a_{i}=\arg \min E\left[e^{2}[n]\right],}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/9c1479360ebceaf703b055388dcd8a3f1d251ca6.svg)
onde denota o operador de expectativa. No caso geral, os coeficientes podem ser complexos e podem ser derivados para o caso em que w[n] e s[n] também são complexos. Com um sinal complexo, a matriz a ser resolvida é uma matriz de Toeplitz Hermitiana, em vez de uma matriz de Toeplitz simétrica. Para simplificar, a expressão seguinte considera apenas o caso em que todas essas quantidades são reais. O erro quadrático médio (MSE) pode ser reescrito como:
![{\displaystyle E[\cdot ]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/57d488a22bc9f41e976d3afb6036190bcbb36b2e.svg)

![{\displaystyle {\begin{aligned}E\left[e^{2}[n]\right]&=E\left[(x[n]-s[n])^{2}\right]\\&=E\left[x^{2}[n]\right]+E\left[s^{2}[n]\right]-2E[x[n]s[n]]\\&=E\left[\left(\sum _{i=0}^{N}a_{i}w[n-i]\right)^{2}\right]+E\left[s^{2}[n]\right]-2E\left[\sum _{i=0}^{N}a_{i}w[n-i]s[n]\right]\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/93fade3732a89c3c06d14e7532d4e5ac8e8ba5e0.svg)
Para encontrar o vetor que minimiza a expressão acima, calcule sua derivada em relação a cada
![{\displaystyle [a_{0},\,\ldots ,\,a_{N}]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/23b15c3b4639ed827b254c60c133606cec814d33.svg)
![{\displaystyle {\begin{aligned}{\frac {\partial }{\partial a_{i}}}E\left[e^{2}[n]\right]&={\frac {\partial }{\partial a_{i}}}\left\{E\left[\left(\sum _{j=0}^{N}a_{j}w[n-j]\right)^{2}\right]+E\left[s^{2}[n]\right]-2E\left[\sum _{j=0}^{N}a_{j}w[n-j]s[n]\right]\right\}\\&=2E\left[\left(\sum _{j=0}^{N}a_{j}w[n-j]\right)w[n-i]\right]-2E[w[n-i]s[n]]\\&=2\left(\sum _{j=0}^{N}E[w[n-j]w[n-i]]a_{j}\right)-2E[w[n-i]s[n]]\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/32d0c093c419d914a8d0b81eb7b53aec3d2e77bf.svg)
Assumindo que w[n] e s [n] são cada um estacionário e conjuntamente estacionário, as sequências e conhecida respectivamente como a autocorrelação de w[n] e a correlação cruzada entre w[n] e s[n] pode ser definida como segue:
![{\displaystyle R_{w}[m]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/6fd433a0ac1fe24b6b95d7bad92cea453be5c7f2.svg)
![{\displaystyle R_{ws}[m]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/7e7790e74796ce594e25ef54c65a4af6ea895803.svg)
![{\displaystyle {\begin{aligned}R_{w}[m]&=E\{w[n]w[n+m]\}\\R_{ws}[m]&=E\{w[n]s[n+m]\}\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/013fa6d6fbd4e75c4c4ffefdc98dde2ba69d0aeb.svg)
A derivada do MSE pode, portanto, ser reescrita como:
![{\displaystyle {\frac {\partial }{\partial a_{i}}}E\left[e^{2}[n]\right]=2\left(\sum _{j=0}^{N}R_{w}[j-i]a_{j}\right)-2R_{ws}[i]\qquad i=0,\cdots ,N.}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/0b838dec6ea00072ce0d8b4ec7e69c4c24768811.svg)
Note que para o real , a autocorrelação é simétrica: Igualar a derivada a zero resulta em:
![{\displaystyle w[n]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/2a4e3e5afc2a8c6da9020b8c6b21450959101a18.svg)
![{\displaystyle R_{w}[j-i]=R_{w}[i-j]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/0a7c44b249eb0d5faa8fd08516814ecedbebc451.svg)
![{\displaystyle \sum _{j=0}^{N}R_{w}[j-i]a_{j}=R_{ws}[i]\qquad i=0,\cdots ,N.}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/2a9984c26d8ebeb301f22cbeeaa797ee44ef7632.svg)
que pode ser reescrito (usando a propriedade simétrica acima) em forma de matriz:
![{\displaystyle \underbrace {\begin{bmatrix}R_{w}[0]&R_{w}[1]&\cdots &R_{w}[N]\\R_{w}[1]&R_{w}[0]&\cdots &R_{w}[N-1]\\\vdots &\vdots &\ddots &\vdots \\R_{w}[N]&R_{w}[N-1]&\cdots &R_{w}[0]\end{bmatrix}} _{\mathbf {T} }\underbrace {\begin{bmatrix}a_{0}\\a_{1}\\\vdots \\a_{N}\end{bmatrix}} _{\mathbf {a} }=\underbrace {\begin{bmatrix}R_{ws}[0]\\R_{ws}[1]\\\vdots \\R_{ws}[N]\end{bmatrix}} _{\mathbf {v} }}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/22ca4ea294dd47b8d634cb78e5be93073547626f.svg)
Essas equações são conhecidas como equações de Wiener-Hopf. A matriz T que aparece na equação é uma matriz de Toeplitz simétrica. Sob condições adequadas em , essas matrizes são conhecidas por serem definidas positivas e, portanto, não singulares, produzindo uma solução única para a determinação do vetor de coeficientes do filtro de Wiener, . Além disso, existe um algoritmo eficiente para resolver tais equações de Wiener–Hopf conhecido como algoritmo de Levinson-Durbin, portanto uma inversão explícita de T não é necessária.


Em alguns artigos, a função de correlação cruzada é definida de maneira oposta: Então, a matriz conterá ; isso é apenas uma diferença na notação.
![{\displaystyle R_{sw}[m]=E\{w[n]s[n+m]\}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/674ae192cf58157ffa143e5a78c60150f9e0ec96.svg)

![{\displaystyle R_{sw}[0]\ldots R_{sw}[N]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/c74f1a47c80f31bc0f228f14d5efc080ecfb440e.svg)
Qualquer que seja a notação usada, observe que para valores reais :
![{\displaystyle w[n],s[n]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/47e41c9959e941c5694db0af5c0634c4537c574c.svg)
![{\displaystyle R_{sw}[k]=R_{ws}[-k]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/185aafdce950ee0f36925021ae3c93f5c5023d5b.svg)
Relação com o filtro de mínimos quadrados
A realização do filtro de Wiener causal se assemelha muito à solução para a estimativa de mínimos quadrados, exceto no domínio do processamento de sinais. A solução de mínimos quadrados, para a matriz de entrada e vetor de saída é:



O filtro de Wiener FIR está relacionado ao filtro dos mínimos quadrados médios, mas a minimização do critério de erro deste último não depende de correlações cruzadas ou autocorrelações. Sua solução converge para a solução do filtro de Wiener.
Sinais complexos
Para sinais complexos, a derivação do filtro Wiener complexo é realizada minimizando = . Isso envolve o cálculo de derivadas parciais em relação às partes reais e imaginárias de , e exigindo que ambos sejam zero.
![{\displaystyle E\left[|e[n]|^{2}\right]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/ff9d46fcdf6b205655f7182df44cc92ec004ce5d.svg)
![{\displaystyle E\left[e[n]e^{*}[n]\right]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/660e20966e374f35618b457d09451af5d0b1d7b1.svg)
As equações de Wiener-Hopf resultantes são:
![{\displaystyle \sum _{j=0}^{N}R_{w}[j-i]a_{j}^{*}=R_{ws}[i]\qquad i=0,\cdots ,N.}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/5a382076f2533f0688f1875d8f3a133be3d531f1.svg)
que pode ser reescrito em forma de matriz:
![{\displaystyle \underbrace {\begin{bmatrix}R_{w}[0]&R_{w}^{*}[1]&\cdots &R_{w}^{*}[N-1]&R_{w}^{*}[N]\\R_{w}[1]&R_{w}[0]&\cdots &R_{w}^{*}[N-2]&R_{w}^{*}[N-1]\\\vdots &\vdots &\ddots &\vdots &\vdots \\R_{w}[N-1]&R_{w}[N-2]&\cdots &R_{w}[0]&R_{w}^{*}[1]\\R_{w}[N]&R_{w}[N-1]&\cdots &R_{w}[1]&R_{w}[0]\end{bmatrix}} _{\mathbf {T} }\underbrace {\begin{bmatrix}a_{0}^{*}\\a_{1}^{*}\\\vdots \\a_{N-1}^{*}\\a_{N}^{*}\end{bmatrix}} _{\mathbf {a^{*}} }=\underbrace {\begin{bmatrix}R_{ws}[0]\\R_{ws}[1]\\\vdots \\R_{ws}[N-1]\\R_{ws}[N]\end{bmatrix}} _{\mathbf {v} }}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/5189a3cd5eb8558934169b1ed63016fa0f5b14a7.svg)
Observe aqui que:
![{\displaystyle {\begin{aligned}R_{w}[-k]&=R_{w}^{*}[k]\\R_{sw}[k]&=R_{ws}^{*}[-k]\end{aligned}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/b747272d7edd8e56a4fa0ae17bc829245cefd5c2.svg)
O vetor de coeficiente de Wiener é então calculado como:

Aplicações
O filtro de Wiener tem uma variedade de aplicações em processamento de sinais, processamento de imagens,[7] sistemas de controle e comunicações digitais. Essas aplicações geralmente se enquadram em uma das quatro categorias principais:
- Identificação de sistemas
- Desconvolução
- Redução de ruído
- Detecção de sinal


O filtro de Wiener pode ser usado no processamento de imagens para remover ruído de uma imagem. Por exemplo, usar a função matemática: WienerFilter[image,2] na primeira imagem à direita produz a imagem filtrada abaixo dela.
É comumente usado para reduzir ruído em sinais de áudio, especialmente fala, como um pré-processador antes do reconhecimento de fala.
É usado pelo SVT-AV1, que é um formato de codificação de vídeo para redução de granularidade.[8]
História
O filtro foi proposto por Norbert Wiener durante a década de 1940 e publicado em 1949.[9][5] A versão em tempo discreto do trabalho de Wiener foi derivada de forma independente por Andrey Kolmogorov e publicada em 1941.[10] Portanto, a teoria é frequentemente chamada de teoria de filtragem de Wiener-Kolmogorov (cf. Krigagem). O filtro de Wiener foi o primeiro filtro projetado estatisticamente a ser proposto e, posteriormente, deu origem a muitos outros, incluindo o filtro de Kalman.
Veja também
Leitura adicional
- Thomas Kailath, Ali H. Sayed e Babak Hassibi, Estimativa Linear, Prentice-Hall, NJ, 2000, ISBN 978-0-13-022464-4.
Referências
- ↑ Plett, G.; Vetterli, M. «EE264: Lecture 12 - Wiener Filtering» (PDF). Stanford University. Consultado em 20 de março de 2025
- ↑ Oppenheim, A. V.; Verghese, G. C. «Signals, Systems and Inference, Chapter 11: Wiener Filtering» (PDF). MIT OpenCourseWare. Consultado em 20 de março de 2025
- ↑ a b Haykin, Simon S. (2014). Adaptive filter theory Fifth edition ed. Upper Saddle River, New Jersey: Pearson. ISBN 978-0-13-267145-3
- ↑ a b Brown, Robert Grover; Hwang, Patrick Y.C. (1996). Introduction to Random Signals and Applied Kalman Filtering 3 ed. New York: John Wiley & Sons. ISBN 978-0-471-12839-7
- ↑ a b Wiener, Norbert (1949). Extrapolation, Interpolation, and Smoothing of Stationary Time Series: With Engineering Applications. [S.l.]: MIT Press. ISBN 9780262257190
- ↑ Welch, Lloyd R. «Wiener–Hopf Theory» (PDF). Consultado em 25 de novembro de 2006. Arquivado do original (PDF) em 20 de setembro de 2006
- ↑ Boulfelfel, D.; Rangayyan, R. M.; Hahn, L. J.; Kloiber, R. (1994). «Three-dimensional restoration of single photon emission computed tomography images». IEEE Transactions on Nuclear Science. 41 (5): 1746–1754. Bibcode:1994ITNS...41.1746B. doi:10.1109/23.317385
- ↑ «Docs/Appendix-Film-Grain-Synthesis.md · master · Alliance for Open Media / SVT-AV1 · GitLab». GitLab (em inglês). 21 de março de 2025. Consultado em 24 de junho de 2025
- ↑ Wiener N: The interpolation, extrapolation and smoothing of stationary time series', Report of the Services 19, Research Project DIC-6037 MIT, February 1942
- ↑ Kolmogorov A.N: 'Stationary sequences in Hilbert space', (In Russian) Bull. Moscow Univ. 1941 vol.2 no.6 1-40. English translation in Kailath T. (ed.) Linear least squares estimation Dowden, Hutchinson & Ross 1977 ISBN 0-87933-098-8
Ligações externas
- Função matemática do Filtro de Wiener