Cálculo diferencial
O cálculo diferencial é uma parte essencial da análise e, portanto, um ramo da Matemática. O tema central do cálculo diferencial é o cálculo das variações locais de funções. Enquanto uma função contínua associa continuamente certos valores de saída aos seus valores de entrada, o cálculo diferencial determina o quanto os valores de saída mudam após alterações muito pequenas nos valores de entrada. Está intimamente relacionado com o Cálculo integral, com o qual é agrupado sob a designação de Cálculo infinitesimal.
A derivada de uma função serve para representar as variações locais de uma função e é, ao mesmo tempo, o conceito fundamental do cálculo diferencial. Em vez de derivada, fala-se também de quociente diferencial, cujo equivalente geométrico é a inclinação da tangente. A derivada é, segundo a conceção de Leibniz, o fator de proporcionalidade entre mudanças infinitesimais do valor de entrada e as resultantes mudanças, também infinitesimais, do valor da função. Uma função é chamada de diferenciável se existir tal fator de proporcionalidade. Equivalentemente, a derivada num ponto é definida como a inclinação daquela função linear que, de entre todas as funções lineares, melhor aproxima localmente a variação da função no ponto considerado. Da mesma forma, obtém-se com a derivada no ponto uma aproximação linear da função. A Linearização de uma função possivelmente complicada tem a vantagem de resultar numa função mais simples de tratar do que a função original.
Em muitos casos, o cálculo diferencial é uma ferramenta indispensável para a criação de modelos matemáticos, que devem representar a realidade da forma mais exata possível, bem como para a sua posterior análise.
- O comportamento de componentes com uma curva característica não linear é descrito, para pequenas variações de sinal nas proximidades de um ponto de referência, pelo seu comportamento de pequenos sinais; este baseia-se no traçado da tangente à curva característica no ponto de referência.
- A derivada em ordem ao tempo é, no contexto analisado, a taxa de variação instantânea. Assim, por exemplo, a derivada da função posição ou espaço-tempo de uma partícula em ordem ao tempo é a sua velocidade instantânea, e a derivada da velocidade instantânea em ordem ao tempo fornece a aceleração instantânea.
- Nas ciências económicas, fala-se também frequentemente de taxas marginais em vez de derivada, por exemplo, custos marginais ou produtividade marginal de um fator de produção.
Na linguagem da Geometria, a derivada é uma inclinação generalizada. O conceito geométrico de inclinação é originalmente definido apenas para funções lineares, cujo gráfico é uma reta. A derivada de uma função arbitrária num ponto pode ser definida como a inclinação da Tangente no ponto do gráfico de .



Na linguagem da Aritmética, escreve-se para a derivada de uma função no ponto . Ela indica por qual fator de a função muda aproximadamente quando muda numa "pequena" quantidade . Para a formulação exata deste facto, utiliza-se o conceito de limite.




Introdução
Introdução através de um exemplo
Se um carro viaja por uma estrada, pode-se criar uma tabela com base nessa situação, na qual a distância percorrida desde o início do registo é anotada a cada instante de tempo. Na prática, é conveniente não criar uma tabela com intervalos demasiado curtos, ou seja, num período de 1 minuto, fazer um novo registo apenas a cada 3 segundos, o que exigiria apenas 20 medições. No entanto, em teoria, uma tal tabela pode ser tornada tão pormenorizada quanto se deseje se cada instante de tempo tiver de ser considerado. Ao fazê-lo, os dados discretos anteriores, ou seja, dados contáveis separados por um intervalo, passam para um contínuo. O presente é então interpretado como um instante no tempo, ou seja, um período de tempo infinitamente curto. Ao mesmo tempo, porém, o carro percorreu uma distância teoricamente conhecida em todos os momentos e, a menos que trave até parar ou mesmo ande de marcha à ré, a distância aumentará continuamente, ou seja, nunca será a mesma num momento e noutro.
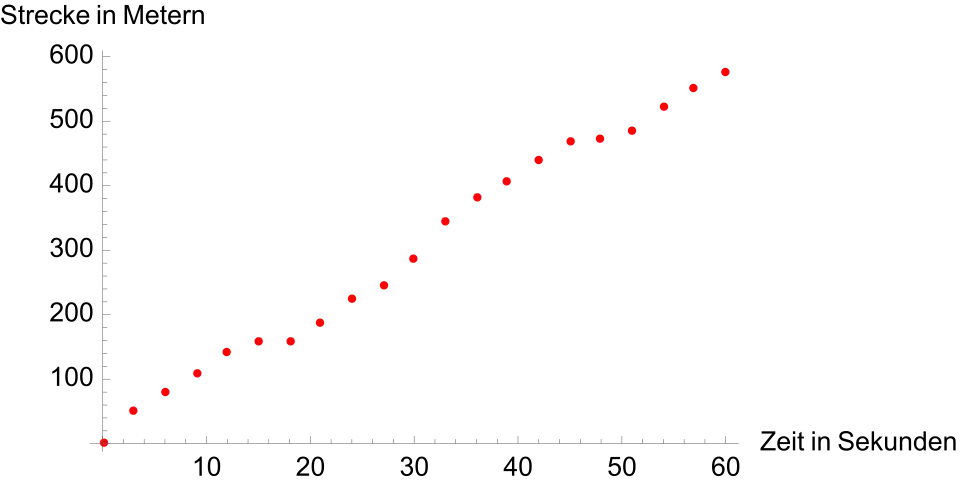 Representação exemplar de uma tabela; uma nova medição é registada a cada 3 segundos. Nessas condições, apenas se podem calcular velocidades médias nos períodos de 0 a 3, 3 a 6, etc. segundos. Uma vez que a distância percorrida está sempre a aumentar, o carro parece estar apenas a avançar.
Representação exemplar de uma tabela; uma nova medição é registada a cada 3 segundos. Nessas condições, apenas se podem calcular velocidades médias nos períodos de 0 a 3, 3 a 6, etc. segundos. Uma vez que a distância percorrida está sempre a aumentar, o carro parece estar apenas a avançar.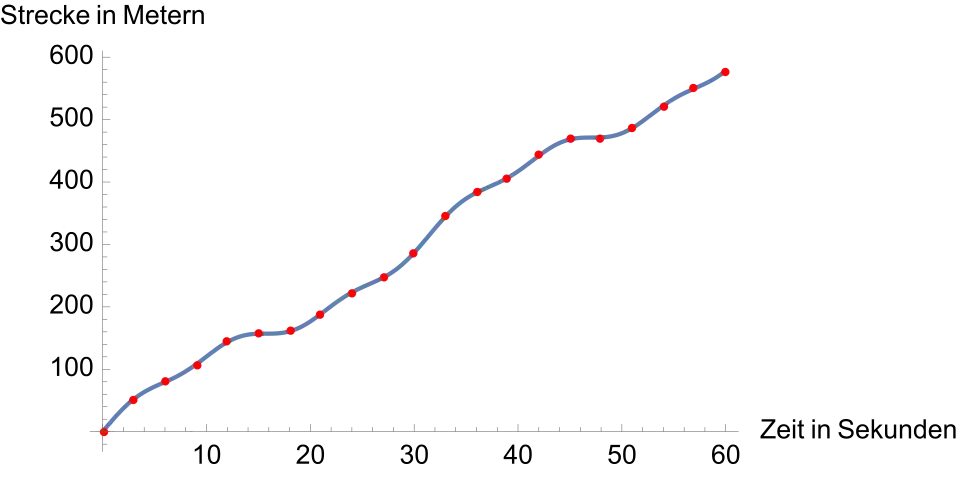 Transição para uma tabela com intervalos tão curtos quanto se queira, que assume a forma de uma curva depois de todos os pontos terem sido traçados. A cada instante entre 0 e 60 segundos é atribuído um ponto na curva. As regiões em que a curva é mais íngreme correspondem a períodos em que é percorrida uma maior distância por unidade de tempo. Em regiões onde a distância permanece quase a mesma, por exemplo na faixa dos 15-20 segundos, o carro desloca-se lentamente e a curva é plana.
Transição para uma tabela com intervalos tão curtos quanto se queira, que assume a forma de uma curva depois de todos os pontos terem sido traçados. A cada instante entre 0 e 60 segundos é atribuído um ponto na curva. As regiões em que a curva é mais íngreme correspondem a períodos em que é percorrida uma maior distância por unidade de tempo. Em regiões onde a distância permanece quase a mesma, por exemplo na faixa dos 15-20 segundos, o carro desloca-se lentamente e a curva é plana.
A motivação por trás do conceito de derivada de uma curva ou função espaço-tempo é que agora é possível especificar quão rápido o carro se move num determinado instante. A partir de um gráfico de espaço-tempo, o correspondente perfil de velocidade-tempo deve, portanto, ser derivado. O raciocínio é que a velocidade é uma medida de quão fortemente a distância percorrida muda ao longo do tempo. Com uma velocidade alta, observa-se uma subida acentuada na curva, enquanto uma velocidade baixa leva a poucas alterações. Dado que a cada ponto de medição foi também atribuída uma distância, tal análise deveria, em princípio, ser possível, porque com o conhecimento da distância percorrida dentro de um intervalo de tempo , a velocidade é dada por



Assim, se e são dois instantes de tempo diferentes, "a velocidade" do carro no intervalo de tempo entre eles é



As diferenças no numerador e no denominador devem ser formadas, uma vez que se está interessado apenas na distância percorrida dentro de um determinado intervalo de tempo . No entanto, esta abordagem não fornece uma imagem completa, visto que inicialmente apenas foram medidas as velocidades para intervalos de tempo com pontos de partida e de chegada distantes. Uma velocidade instantânea, por outro lado, comparável à foto de um radar de velocidade, referir-se-ia a um intervalo de tempo infinitamente curto. Consequentemente, o termo "velocidade" acima deve ser precisado como "velocidade média". Mesmo quando se trabalha com intervalos de tempo reais, ou seja, dados discretos, o modelo simplifica-se na medida em que não é possível ao carro sofrer uma mudança repentina de posição ou uma mudança repentina de velocidade dentro dos intervalos considerados. (Mesmo uma travagem a fundo requer tempo, concretamente mais tempo do que aquele em que os pneus chiam.) Isto justifica também que a curva desenhada implicitamente de forma contínua não tenha saltos nem quebras.


Se, por outro lado, se desejar passar para um perfil de velocidade-tempo "perfeitamente ajustado", a expressão "velocidade média num intervalo de tempo" deve ser substituída por "velocidade num instante de tempo". Para isso, deve primeiro ser escolhido um instante . A ideia agora é deixar que "intervalos de tempo extensos" corram em direção a um intervalo de tempo infinitamente curto num processo de limite e estudar o que acontece com as velocidades médias em questão. Embora o denominador tenda para 0, isso não é um problema intuitivo, uma vez que o carro pode mover-se cada vez menos em períodos de tempo cada vez mais curtos num decurso contínuo, com o qual o numerador e o denominador diminuem simultaneamente e surge uma expressão indeterminada "" no processo de limite. Esta pode, em certas circunstâncias, fazer sentido como um limite, por exemplo as expressões


exprimem exatamente as mesmas velocidades. Agora existem duas possibilidades ao estudar as velocidades. Ou elas não mostram qualquer tendência para se aproximarem de um determinado valor finito no processo de limite considerado. Neste caso, nenhuma velocidade válida no instante pode ser atribuída ao movimento do carro, ou seja, a expressão "" não tem significado inequívoco aqui. Se, por outro lado, houver uma estabilização crescente em direção a um valor fixo, então o limite existe

e expressa a velocidade exata no instante . A expressão indeterminada "" assume, neste caso, um valor inequívoco. A velocidade instantânea daí resultante também é designada por derivada de no ponto ; o símbolo é frequentemente utilizado para esta. Com o limite, a velocidade instantânea em qualquer instante é definida como



Princípio do cálculo diferencial
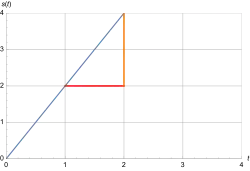

O exemplo da seção anterior é particularmente simples quando o aumento da distância percorrida ao longo do tempo é uniforme, ou seja, linear. Então, existe especificamente uma Proporcionalidade entre a mudança na distância e a mudança no tempo. A mudança relativa da distância, ou seja, o seu aumento em relação ao aumento do tempo, permanece sempre a mesma durante este movimento. A velocidade média é a velocidade instantânea a qualquer momento. Por exemplo, entre 0 e 1 segundo o carro viaja a mesma distância que entre 9 e 10 segundos, e dez vezes a distância entre 0 e 10 segundos. A velocidade constante aplica-se como um fator de proporcionalidade em toda a distância, sendo no quadro ao lado de . A distância percorrida entre dois instantes e , arbitrariamente distantes, é




- .

Em geral, o carro move-se para a frente uma distância no período de tempo . Especificamente em , isto resulta num trecho de caminho .



Se o valor inicial em não for mas sim , isto não altera nada, uma vez que na relação a constante é sempre subtraída através da diferença de . Isto também é claro do ponto de vista intuitivo: A posição inicial do carro é irrelevante para a sua velocidade.





Se as variáveis e forem geralmente consideradas em vez das variáveis e , pode-se afirmar o seguinte:

- Funções lineares: No caso de linearidade, a função considerada tem a forma . (Para uma função linear não é necessária uma reta que passe pela origem!). A mudança relativa aplica-se como a derivada, por outras palavras o quociente de diferenças . Tem o mesmo valor em todos os pontos. A derivada pode ser lida diretamente a partir da expressão . Em particular, qualquer Função constante tem a derivada , uma vez que uma alteração no valor de entrada não altera nada no valor de saída.






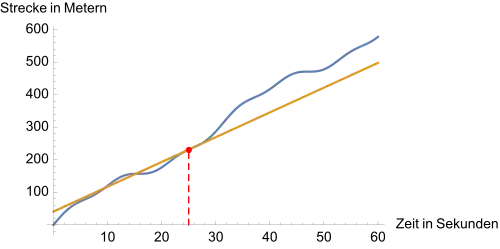
Torna-se mais difícil quando um movimento não é uniforme. Nesses casos, o diagrama da função tempo-distância não é uma linha reta. Para tais percursos, o conceito de derivada deve ser alargado. Pois não há fator de proporcionalidade que expresse a mudança relativa local em todas as partes. Como única estratégia possível, encontrou-se a obtenção de uma Aproximação linear para a função não linear, pelo menos num ponto de interesse. (Na figura seguinte, este é o ponto .) Assim, o problema é reduzido a uma função que é linear pelo menos neste ponto. O método da Linearização é a base do verdadeiro Cálculo diferencial. É de grande importância na análise, porque ajuda a reduzir processos complexos localmente para processos mais fáceis de entender, nomeadamente processos lineares.[1]

| 0,5 | 0,9 | 0,99 | 0,999 | 1 | 1,001 | 1,01 | 1,1 | 1,5 | 2 | |
| 0,25 | 0,81 | 0,9801 | 0,998001 | 1 | 1,002001 | 1,0201 | 1,21 | 2,25 | 4 | |
| 0 | 0,8 | 0,98 | 0,998 | 1 | 1,002 | 1,02 | 1,2 | 2 | 3 | |
| −0,25 | −0,01 | −0,0001 | −0,000001 | 0 | −0,000001 | −0,0001 | −0,01 | −0,25 | −1 | |
| 50 % | 10 % | 1 % | 0,1 % | 0,1 % | 1 % | 10 % | 50 % | 100 % |




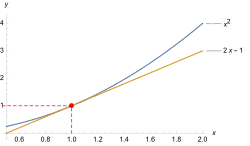


A estratégia será explicada como exemplo usando a função não linear .[2] A tabela mostra os valores desta função e da sua função de aproximação no ponto , que é . Abaixo, a tabela contém o desvio da aproximação em relação à função original. (Os valores são negativos porque, neste caso, a reta encontra-se sempre abaixo da curva – exceto no ponto de tangência.) Na última linha está o valor absoluto do desvio relativo, que é o desvio em relação à distância do ponto ao ponto de tangência em . Este não pode ser calculado no ponto de tangência. Mas os valores na sua vizinhança mostram como o desvio relativo se aproxima de um limite, neste caso o valor zero. Este zero significa: Mesmo que se afaste um pouco (infinitesimalmente) do ponto de tangência, ainda não há diferença entre e .

A função linear imita bem o comportamento de perto do ponto (melhor que qualquer outra função linear). A variação relativa tem o valor em todos os lugares. Mas a variação relativa , que não é tão simples de determinar, coincide com o valor no ponto de tangência.



Em resumo, pode-se afirmar:
- Funções não lineares: Se a variação relativa de uma função não linear tiver de ser determinada num determinado ponto, ela é aí aproximada de forma linear (se possível). O declive da função de aproximação linear é o declive da função não linear em análise nesse ponto, e aplica-se a mesma intuição que para as derivadas de funções lineares. Deve apenas ter-se em conta que a variação relativa de uma função não linear muda de ponto para ponto.
- Enquanto no exemplo acima (movimento do veículo), o período de tempo para a velocidade média pode ser escolhido de forma razoavelmente arbitrária, a velocidade instantânea, se for variável, só pode ser especificada para pequenos. Quão pequeno deve ser escolhido depende dos requisitos relativos à qualidade da aproximação. Na perfeição matemática, torna-se infinitesimal. Nesta, em vez do quociente de diferenças , é escrito o quociente diferencial (em notação simplificada ou ) para a mudança relativa (como já indicado acima).



A obtenção da aproximação linear de uma função não linear num determinado ponto é a tarefa central do cálculo diferencial. No caso de uma função matematicamente especificável (no exemplo era ), a derivada deve poder ser calculada. Idealmente, este cálculo é mesmo tão geral que pode ser aplicado a todos os pontos do domínio de definição. No caso de , todo o ponto tem o declive como a melhor aproximação linear. Com a informação adicional de que a função linear deve coincidir com a curva no ponto , pode então ser formulada a equação da função completa da função de aproximação linear.

A abordagem para determinar o quociente diferencial reside no cálculo do limite (como acima na velocidade instantânea):
- ou noutra notação


Para algumas funções elementares, como a Função de potência, a Função exponencial, a função logarítmica ou a função seno, o processo de limite já foi realizado. Em cada caso, isso resulta numa função derivada. Com base nisto, foram estabelecidas Regras de derivação para funções elementares, bem como para outras funções, tais como somas, produtos ou composições de funções elementares.
Desta forma, as passagens ao limite não têm de ser efetuadas de novo em cada aplicação; em vez disso, as regras de derivação são aplicadas na prática de cálculo. A "arte" do cálculo diferencial consiste "apenas" em estruturar funções mais complicadas e em aplicar a regra de derivação adequada aos elementos estruturais. Segue-se um exemplo mais à frente.
Cálculo de limites
Todo o quociente diferencial num dado ponto surge como uma expressão indeterminada do tipo "". O seu cálculo baseia-se no quociente de diferenças, e o seu comportamento na vizinhança do ponto pretendido é examinado para ver se tem a tendência de assumir um determinado valor. Alguns limites necessários para as regras de derivação são deduzidos a seguir. Naturalmente, não se pode recorrer a quaisquer regras de cálculo diferencial para isso, uma vez que estas só podem ser estabelecidas após o conhecimento dos limites.
- Um caso simples 1

O ponto de partida é o quociente de diferenças para a função designada.

Se for introduzida a fórmula binomial , uma parcela é eliminada.


Para , esta fração é indeterminada. Mas para (se e só se!) o numerador e o denominador podem ser divididos por .




Para todo o , esta expressão é determinada, mesmo que se aproxime do valor . No limite, ela tende para

A seguir, apenas são calculados limites aqui, e a sua substituição nos quocientes de diferenças ocorre mais abaixo, na seçãoCálculo de derivadas.
- Caso 2

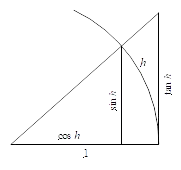
Para esta fração é indeterminada. Para o cálculo para , a área de um Setor circular com o arco é comparada com as áreas de um triângulo interior e de um triângulo exterior, de acordo com o desenho. No quadrante apresentado, é óbvio que[3]


Para , esta desigualdade pode ser multiplicada por .



Para , tanto a expressão à esquerda como a à direita tendem para um (isto é o que rege o Teorema do confronto). Desta forma, a expressão intermédia também deve tender para um. O mesmo se aplica ao seu recíproco. Para , o limite tende para


- Consideração intermédia

O logaritmo desta expressão, ou seja, , tende para "" quando . Este logaritmo é aí indeterminado e, consequentemente, também a própria expressão. No entanto, está provado que




assume um valor finito determinado, o qual é designado por Número de Euler . Isto é tratado na hiperligação fornecida e assume-se aqui como conhecido.

- Caso 3

Para esta fração é indeterminada. Contudo, para e a substituição[4]

- ,


é admissível. Isolando mediante o uso do Logaritmo natural, tem-se


Para , tende para e o denominador tende para . Para cada esta expressão é determinada, mesmo que o valor se aproxime de . No limite, ela tende para




Como pré-requisito para esta derivação, deve ser positivo. Para , isto é satisfeito com negativo. Se para houver uma aproximação de a partir do lado de , aplica-se o mesmo limite.


- Caso 4

Para esta fração é indeterminada. Porém, para a substituição é admissível.[5]


Quando , . Para qualquer esta expressão é determinada, mesmo que se aproxime do valor . No limite, ela tende para


Classificação das possíveis aplicações
Problemas de valores extremos
Uma aplicação importante do cálculo diferencial é que, com a ajuda da derivada, é possível determinar os valores extremos locais de uma curva. Em vez de ter de procurar mecanicamente pontos de máximo ou de mínimo através de uma tabela de valores, o cálculo fornece uma resposta direta em alguns casos. Se existe um ponto máximo ou mínimo, a curva não tem uma subida "real" nesse ponto, razão pela qual a linearização ótima tem um declive de 0. Contudo, para a classificação exata de um valor extremo, são necessários mais dados locais da curva, dado que um declive de 0 não é suficiente para a existência de um valor extremo (muito menos de um ponto de máximo ou mínimo).
Na prática, os problemas de valores extremos ocorrem tipicamente quando há processos a otimizar, por exemplo na economia. Frequentemente, resultados desfavoráveis encontram-se nos valores marginais, mas em direção ao "centro" há um aumento constante, que algures deve ser máximo. Por exemplo, a escolha ideal de um preço de venda: A um preço muito baixo, a procura por um produto é muito grande, mas a produção não pode ser financiada. Por outro lado, se o preço for muito alto, na situação extrema deixará de ser comprado de todo. Por conseguinte, o ponto ótimo situa-se algures "no meio". O pré-requisito para isto é que a relação possa ser expressa na forma de uma função (continuamente) diferenciável.
A investigação dos pontos extremos de uma função faz parte de um Estudo de função. Os fundamentos matemáticos encontram-se na seção Aplicação de derivadas de ordem superior (Höhere Ableitungen).
Modelação matemática
Na Modelação matemática, problemas complexos devem ser registados e analisados em linguagem matemática. Dependendo da questão, investigar correlações ou causalidades ou ainda fazer previsões no contexto deste modelo é proveitoso.
Especialmente no domínio das chamadas equações diferenciais, o cálculo diferencial é a ferramenta central na modelação. Estas equações surgem, por exemplo, quando existe uma relação causal entre o tamanho/população de uma quantidade e a sua variação no tempo. Um exemplo prático seria:
- Quantos mais habitantes uma cidade tiver, mais pessoas querem mudar-se para lá.
Isto poderia, por exemplo, significar que, com habitantes atuais, em média de pessoas vão mudar-se para a cidade nos próximos 10 anos, com habitantes em média pessoas nos próximos 10 anos etc. — para não enumerar todos os números individualmente: Se houverem pessoas a viver na cidade, outras tantas querem mudar-se para que, após 10 anos, fossem adicionados mais indivíduos. Se existir tal causalidade entre a população e a sua alteração ao longo do tempo, pode-se perguntar se uma previsão para o número de habitantes após 10 anos pode ser derivada destes dados, assumindo que a cidade tinha habitantes no ano 2020. Seria errado pensar que este número será , pois à medida que o número de habitantes aumenta, a procura por alojamento aumentará correspondentemente cada vez mais. O ponto-chave para compreender a correlação é, mais uma vez, a sua localidade: Se a cidade tem de habitantes, neste momento de pessoas desejam mudar-se num espaço de 10 anos. Mas um pouco mais tarde, quando mais pessoas tiverem se mudado, a situação será diferente. Se este fenómeno for concebido de forma tão finamente escalada no tempo quanto se queira, o resultado é uma relação "diferencial". No entanto, em muitos casos, a abordagem contínua também é adequada para problemas discretos.[6]




Com a ajuda do cálculo diferencial, um modelo pode muitas vezes ser derivado de tal relação causal entre a dimensão de uma população e a sua variação, o que resolve a relação complexa no sentido em que, no final, uma função de quantidade pode ser especificada explicitamente. Se, em seguida, inserirmos o valor de 10 anos nesta função, o resultado é uma previsão da população urbana no ano de 2030. No caso do modelo acima, procura-se uma função de quantidade com , sendo 10 anos e . A solução é então




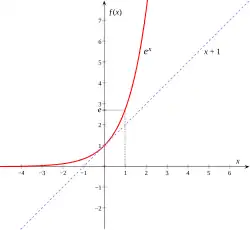
com a função exponencial natural (natural significa que o fator de proporcionalidade entre o estoque e a alteração é simplesmente igual a 1) e para o ano de 2030 a previsão estimada é de milhões de habitantes. A proporcionalidade entre a quantidade populacional e a taxa de alteração leva, portanto, ao Crescimento exponencial e é um exemplo clássico de um efeito de autorreforço. Modelos análogos funcionam para o crescimento da população (quanto mais indivíduos, mais nascimentos) ou para a propagação de uma doença infeciosa (quanto mais doentes, mais infeções). Porém, em muitos casos, estes modelos atingem um limite quando o processo não pode ser continuado indefinidamente devido a restrições naturais (como um limite superior da população total). Nestes casos, modelos similares, como o crescimento logístico, são mais adequados.[7]

Métodos numéricos
A propriedade de uma função de ser diferenciável é vantajosa para muitas aplicações, visto conferir mais estrutura à função. Um exemplo é a resolução de equações. Em algumas aplicações matemáticas, é necessário encontrar o valor de uma (ou várias) incógnita que seja a raiz de uma função . Ou seja, tem-se . Dependendo da natureza de , podem ser desenvolvidas estratégias para indicar uma raiz, pelo menos aproximadamente, o que é quase sempre suficiente na prática. Se for diferenciável em todos os pontos com a derivada , o Método de Newton pode ajudar em muitos dos casos. Neste, o cálculo diferencial desempenha um papel direto, dado que uma derivada deve ser explicitamente calculada repetidas vezes durante o procedimento passo-a-passo.[8]

Outra vantagem do cálculo diferencial reside no fato de que, em muitos casos, funções complicadas, tais como raízes, senos e cossenos, podem ser bem aproximadas utilizando regras de cálculo simples, como a adição e a multiplicação. Se a função for fácil de avaliar num valor vizinho, isso é de grande utilidade. Se, por exemplo, procurarmos um valor aproximado para o número , o cálculo diferencial fornece para a linearização



porque de forma manifesta . Quer a função como a primeira derivada podem ser facilmente calculadas no ponto , por ser um quadrado perfeito. Inserindo resulta em , o que corresponde ao resultado exato à exceção de um erro inferior a .[9] Se se incluírem derivadas de ordem superior, a exatidão destas aproximações pode ser ainda mais aumentada, por se tratar de aproximações quadráticas, cúbicas, etc., e não apenas lineares, ver também Série de Taylor.






Matemática pura
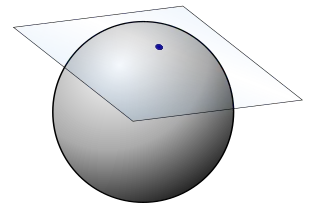
Na Matemática pura, o cálculo diferencial desempenha também um papel importante enquanto elemento nuclear da análise. Um exemplo é a Geometria diferencial, a qual lida com figuras que têm uma superfície diferenciável (sem dobras, etc.). Por exemplo, um plano pode ser colocado tangencialmente em cada ponto de uma superfície esférica. Numa perspetiva visual: Se o indivíduo estiver num ponto da Terra, terá a sensação de que a Terra é plana se deixar o seu olhar passear no Plano tangente. Na realidade, porém, a Terra só é localmente plana: o plano criado serve como uma representação simplificada (através da linearização) de uma curvatura mais complicada. Globalmente, ela tem uma forma completamente diferente, que é a superfície de uma esfera.
Os métodos da geometria diferencial são de extrema importância para a Física teórica. É possível descrever fenómenos como a Curvatura e o Espaço-tempo utilizando métodos de cálculo diferencial. Igualmente a questão de qual é a distância mais curta entre dois pontos numa superfície curva (por exemplo, a superfície da Terra) pode ser formulada e não raras vezes respondida através destas técnicas.
Ainda no estudo dos números como tais, ou seja, no contexto da Teoria dos números, o cálculo diferencial revelou-se viável na Teoria analítica dos números. A ideia básica da teoria analítica dos números é a conversão de números específicos sobre os quais se pretende aprender algo em funções. Se essas funções tiverem "boas propriedades", como a diferenciabilidade, espera-se poder retirar conclusões sobre os números originais através das estruturas que as acompanham. Nisto, tem provado ser frequentemente útil passar dos números reais para os números complexos (ver também Análise complexa) a fim de aperfeiçoar a análise, ou seja, de estudar as funções sobre um espectro de números mais vasto. Um exemplo disso é a análise dos números de Fibonacci , cuja lei de formação dita que um novo número tem de resultar sempre da soma dos dois números precedentes. A abordagem da teoria analítica dos números engloba a formação da Função geradora


ou seja, de um polinómio "infinitamente longo" (a chamada Série de potências), cujos coeficientes são exatamente os números de Fibonacci. Esta expressão tem sentido para números suficientemente pequenos, porque as potências então vão para 0 muito mais depressa do que os números de Fibonacci vão para o infinito, estabilizando-se tudo num valor finito a longo prazo. Para estes valores é possível calcular a função explicitamente por meio de



O polinómio do denominador "reflete" de forma exata o comportamento dos números de Fibonacci - resulta de facto através de cálculos termo a termo. Usando o cálculo diferencial, por outro lado, é possível demonstrar que a função é suficiente para caracterizar univocamente os números de Fibonacci (os seus coeficientes). No entanto, como se trata de uma simples função racional, a fórmula exata válida para todo o número de Fibonacci pode ser derivada através de





com a Proporção áurea , se se definir e . A fórmula exata pode ser utilizada para calcular um número de Fibonacci sem ter de conhecer as antecedentes. A conclusão é retirada através de uma designada Comparação de coeficientes e explora o fato de que o polinómio possui como raízes e .[10]






O caso de dimensões superiores
O cálculo diferencial pode ser generalizado para o caso de "funções de dimensões superiores". Isto significa que tanto os valores de entrada como os de saída da função não só fazem parte da reta numérica unidimensional, como são também pontos num espaço dimensionalmente superior. Um exemplo disto é a regra

entre espaços bidimensionais em cada caso. A compreensão da função como uma tabela permanece idêntica aqui, exceto que esta tabela possui "significativamente mais" entradas com as suas "quatro colunas" . Funções multidimensionais também podem, em certos casos, ser linearizadas num ponto. Contudo, é conveniente notar que pode haver múltiplas dimensões de entrada bem como múltiplas dimensões de saída: O caminho adequado de generalização consiste em que a linearização tome em consideração todas as variáveis de um modo linear em todas as componentes de saída. Para o caso da função de exemplo acima, isto implica uma aproximação da forma

- .

Esta aproximação simula então eximiamente toda a função nas proximidades da entrada .[11] Nesse sentido, para cada componente é dada uma "inclinação" para cada variável - que medirá então o comportamento local da componente da função dada uma pequena alteração nessa variável. Esta inclinação é igualmente designada de Derivada parcial.[12] As parcelas de constante corretas calculam-se a título de exemplo pela via de ou por . À imagem do que sucede no caso unidimensional, os declives (aqui ) são fortemente dependentes da escolha do ponto (aqui ) em que se deriva. Consequentemente, a derivada já não é um número, mas antes uma associação de vários números – quatro neste exemplo – e estes números são usualmente diferentes em todas as entradas. Como regra geral para a derivada, escreve-se amiúde





- ,

reunindo todas as "inclinações" numa chamada matriz. Este termo é também conhecido pelo nome de Matriz jacobiana ou matriz funcional.[13]
Exemplo: Se for definido como no caso acima, é possível evidenciar que a seguinte aproximação linear é muito precisa para modificações extremamente pequenas quer de e :


Por exemplo, temos

e

Num cenário plenamente genérico com variáveis e componentes de saída, do ponto de vista combinatório, constam no total de "inclinações", ou seja, derivadas parciais. Na situação clássica de , existe de modo manifesto uma inclinação , ao passo que no exemplo acima ilustrado para constatam-se ser "inclinações".[14]






História
.jpg)

A formulação do problema do cálculo diferencial surgiu como o problema da tangente a partir do século XVII.[15] Entende-se por isto a tarefa de determinar a tangente num ponto arbitrário de uma curva arbitrária. Uma abordagem óbvia para a solução consistia em aproximar a tangente a uma curva através da sua reta secante ao longo de um intervalo finito (finito significa aqui: maior do que zero), mas arbitrariamente pequeno. Para tal, era necessário ultrapassar a dificuldade técnica de calcular com uma largura de intervalo tão infinitesimalmente pequena.
Os primeiros primórdios do cálculo diferencial remontam a Pierre de Fermat. Por volta de 1628, ele desenvolveu um método para determinar os pontos extremos de termos algébricos e calcular tangentes a secções cónicas e outras curvas. O seu "método" era puramente algébrico. Fermat não considerou processos de limite e muito menos derivadas. No entanto, o seu "método" pode ser interpretado e justificado com os meios modernos da análise, e está provado que inspirou matemáticos como Newton e Leibniz. Alguns anos mais tarde, René Descartes optou por uma abordagem algébrica diferente, desenhando um círculo tangente a uma curva. Este interseta a curva em dois pontos próximos um do outro; a menos que toque (tangencie) a curva. Esta abordagem permitiu-lhe determinar o declive da tangente para curvas especiais.[16]
No final do século XVII, Isaac Newton e Gottfried Wilhelm Leibniz conseguiram, de forma independente e com abordagens diferentes, desenvolver cálculos funcionais livres de contradições. Enquanto Newton abordou o problema fisicamente através do problema da velocidade instantânea,[17] Leibniz resolveu-o geometricamente através do problema da tangente. Os seus trabalhos permitiram a abstração da conceção puramente geométrica e são, por isso, considerados o início da análise. Eles tornaram-se conhecidos principalmente através do livro Analyse des Infiniment Petits pour l’Intelligence des Lignes Courbes[18] do nobre Guillaume François Antoine, marquês de l'Hôpital, que teve aulas particulares com Johann Bernoulli e publicou assim a investigação deste último sobre análise. Nele afirma-se:
O alcance deste cálculo é incomensurável: Ele pode ser aplicado tanto a curvas mecânicas como geométricas; os sinais de raiz não lhe causam dificuldades e são frequentemente agradáveis de manusear; pode ser expandido para tantas variáveis quantas se deseje; a comparação de grandezas infinitamente pequenas de todos os tipos é feita sem esforço. E permite um número infinito de descobertas surpreendentes sobre tangentes curvas e retilíneas, questões De maximis & minimis, pontos de inflexão e cúspides de curvas, evolutas, cáusticas de reflexão e refração, etc., como veremos neste livro.
As regras de derivação conhecidas hoje baseiam-se principalmente nas obras de Leonhard Euler, que cunhou o conceito de função.
Newton e Leibniz trabalharam com números positivos arbitrariamente pequenos.[19] Isto já era criticado como ilógico por contemporâneos, por exemplo, por George Berkeley no seu escrito polémico The analyst; or, a discourse addressed to an infidel mathematician.[20]
Apenas na década de 1960 é que Abraham Robinson conseguiu colocar essa utilização de grandezas infinitesimais numa base matemática-axiomática segura com o desenvolvimento da Análise não padronizada. Apesar da incerteza reinante na época, o cálculo diferencial continuou a ser desenvolvido de forma consequente, principalmente devido às suas numerosas aplicações na física e noutras áreas da matemática. Sintomático da época foi o concurso de prêmios publicado pela Academia de Ciências da Prússia em 1784:
[…] A geometria superior utiliza frequentemente grandezas infinitamente grandes e infinitamente pequenas; no entanto, os antigos estudiosos evitaram cuidadosamente o infinito, e alguns analistas famosos do nosso tempo confessam que as palavras "grandeza infinita" são contraditórias. A Academia exige, portanto, que se explique como de uma premissa contraditória surgiram tantos teoremas corretos, e que se forneça um conceito fundamental seguro e claro, que possa substituir o infinito, sem tornar o cálculo demasiado difícil ou demasiado longo […]
Só no início do século XIX é que Augustin-Louis Cauchy conseguiu dar ao cálculo diferencial o rigor lógico habitual de hoje em dia, abandonando as grandezas infinitesimais e definindo a derivada como o limite dos declives das secantes (quocientes de diferenças).[21] A definição de limite utilizada hoje foi finalmente formulada por Karl Weierstrass no ano de 1861.[22]
Definição
Declive da secante e declive da tangente
O ponto de partida para a definição da derivada é a aproximação do declive da tangente por um declive da secante (por vezes também chamado de declive da corda). Procura-se a inclinação de uma função num ponto . Calcula-se primeiro a inclinação da reta secante a sobre um intervalo finito de comprimento :
![{\displaystyle [x_{0},x_{0}+\Delta x]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/d4c9fca7d2a7b17975192095def858d129b413b9.svg)
- Inclinação da secante = .

A inclinação da secante é, portanto, o quociente de duas diferenças; por isso, é também chamada de quociente de diferenças. Com a notação abreviada para , pode-se escrever a inclinação da secante de forma abreviada como . A expressão ilustra, assim, a diferença arbitrariamente pequena entre o ponto no qual se pretende calcular a derivada e um ponto vizinho. Na literatura, contudo, tal como se segue, o símbolo é frequentemente utilizado em vez de por razões de simplicidade.


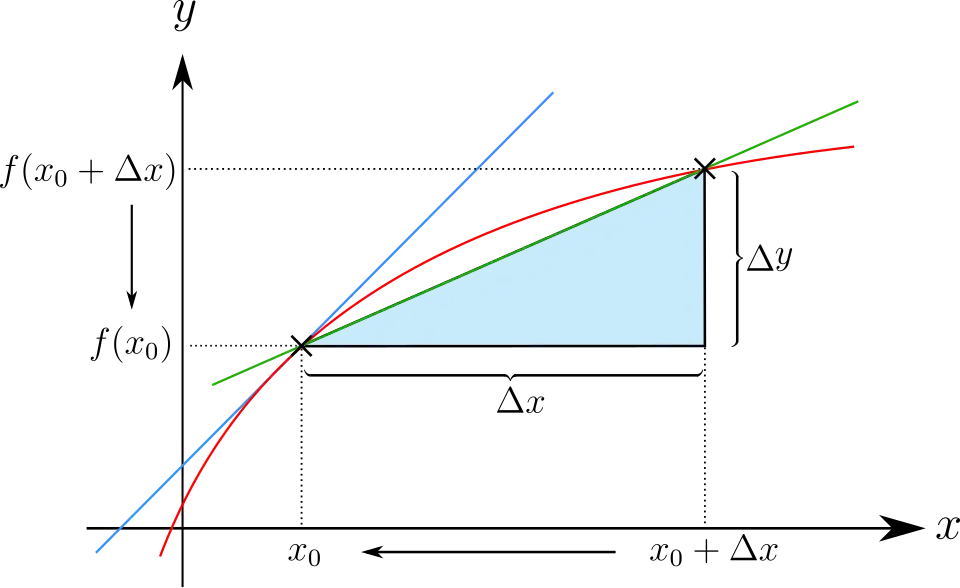
Para calcular o declive da tangente, os dois pontos através dos quais a secante é desenhada devem ser aproximados cada vez mais um do outro. Nisto, tanto como tendem para zero. O quociente , no entanto, permanece finito em muitos casos. A definição seguinte baseia-se nesta passagem ao limite.
Diferenciabilidade



Uma função que mapeia um Intervalo aberto nos números reais é chamada de diferenciável no ponto se o limite



- (com )


existir. Este limite é chamado de quociente diferencial ou derivada de em ordem a no ponto e é notado como
- ou ou ou .[23][24] Estas notações são lidas respetivamente como "f linha de x zero", "d f de x sobre d x no ponto x igual a x zero", "d f sobre d x de x zero" e "d sobre d x de f de x zero". Na seção posterior Notações, são listadas mais variantes para anotar a derivada de uma função.



Ao longo do tempo, foi encontrada a seguinte definição equivalente, a qual provou ser mais poderosa no contexto mais amplo de funções complexas ou multidimensionais: Uma função é chamada diferenciável num ponto se existir uma constante tal que


O crescimento da função , quando nos afastamos ligeiramente de , por exemplo pelo valor , pode, portanto, ser muito bem aproximado por . Por este motivo, a função linear , para a qual é válido para todo , é também denominada a linearização de no ponto .[25]



Uma outra definição é: Existe uma Função contínua no ponto com e uma constante de modo que para todo o vale


- .

As condições e que seja contínua no ponto significam precisamente que o "termo restante" converge para quando tende para .[25]


Em ambos os casos a constante é determinada de forma única e aplica-se . A vantagem desta formulação é que as provas são mais fáceis de realizar, dado que não há necessidade de considerar qualquer quociente. Esta representação da melhor aproximação linear foi consistentemente aplicada por Karl Weierstrass, Henri Cartan e Jean Dieudonné e é também chamada de teorema da aproximação de Weierstrass.

Se uma função for designada como diferenciável, sem referência a um ponto específico, isso implica a diferenciabilidade em todos os pontos do domínio de definição, ou seja, a existência de uma tangente única para cada ponto do gráfico.
Toda a função diferenciável é contínua, mas o inverso não se aplica.[25] Ainda no início do século XIX, acreditava-se que uma função contínua só podia não ser diferenciável, no máximo, num pequeno número de pontos (como a função de valor absoluto). Bernard Bolzano foi então o primeiro matemático a construir uma função, que mais tarde viria a ser designada por Função de Bolzano, que é contínua em toda a parte mas diferenciável em nenhuma parte; no entanto, este facto não se tornou conhecido da comunidade de especialistas. Karl Weierstrass encontrou então de igual modo uma tal função na década de 1860 (ver Função de Weierstrass), o que desta vez causou agitação entre os matemáticos. Um exemplo multidimensional conhecido de uma função contínua e não diferenciável é a Curva de Koch, apresentada por Helge von Koch em 1904.[26]
Função derivada
A derivada da função no ponto , denotada por , descreve localmente o comportamento da função na vizinhança do ponto considerado . Fielmente, é possível efetuar uma linearização em cada ponto do gráfico da função. Isto permite a definição de uma função derivada (ou apenas derivada) , a qual atribui a cada elemento do domínio da função original o declive da linearização nesse ponto. Neste caso, diz-se que " é diferenciável em ".[27]

Por exemplo, a função quadrática com tem a derivada em qualquer ponto , assim a função quadrática é diferenciável no conjunto de números reais. A função derivada associada é dada por com .




Em termos normais, a função derivada é uma função diferente da originalmente considerada. A única exceção são os múltiplos da Função exponencial natural para qualquer – entre os quais, como mostra a escolha , estão também incluídas todas as funções com qualquer (cujo gráfico é criado a partir da função exponencial por um deslocamento paralelo "lateral" em e é, portanto, congruente com ela).







Se a derivada for contínua, diz-se que é continuamente diferenciável. Com base na designação para a totalidade (o espaço) das funções contínuas com domínio , o espaço das funções continuamente diferenciáveis em é abreviado como .[28]


Notações
Por razões históricas, existem diferentes notações para representar a derivada de uma função.
Notação de Lagrange
Neste artigo, a notação tem sido utilizada principalmente até agora para a derivada de . Esta notação remonta ao matemático Joseph-Louis Lagrange, que a introduziu em 1797.[29] Com esta notação, a segunda derivada de é denotada por e a enésima derivada por .


Notação de Newton
Isaac Newton – o fundador do cálculo diferencial juntamente com Leibniz – denotou a primeira derivada de por e correspondentemente notou a segunda derivada por .[30] Atualmente, esta notação é frequentemente utilizada na física, especialmente na Mecânica, para a derivada em relação ao tempo.[31]


Notação de Leibniz
Gottfried Wilhelm Leibniz introduziu a notação para a primeira derivada de (em ordem à variável ).[32] Esta expressão lê-se como "d f de x sobre d x". Para a segunda derivada, Leibniz notou e a enésima derivada é denotada por .[33] A notação de Leibniz não é uma fração. Os símbolos e são designados por "diferenciais", mas no cálculo diferencial moderno (com exceção da teoria das formas diferenciais ou na Análise não padronizada) têm um significado puramente simbólico, inseridos no quociente diferencial. Em algumas aplicações (Regra da cadeia, integração de algumas equações diferenciais, Integração por substituição), no entanto, calcula-se com eles como se fossem termos comuns.





Notação de Euler
A notação ou para a primeira derivada de remonta a Leonhard Euler. Neste caso, a derivada é entendida como um operador – ou seja, uma função especial que por si mesma atua sobre funções. Esta ideia remonta ao matemático Louis François Antoine Arbogast. A segunda derivada é representada nesta notação através de ou e a enésima derivada através de ou .[34]






Cálculo da derivada
O cálculo da derivada de uma função é chamado de diferenciação ou derivação; ou seja, diz-se que se diferencia ou deriva essa função.
Para calcular a derivada de funções elementares (por ex. , , …), atemo-nos estritamente à definição dada acima, calculamos explicitamente um quociente de diferenças e depois fazemos com que tenda para zero. Contudo, este método é geralmente trabalhoso. No ensino do cálculo diferencial, este tipo de cálculo é, portanto, realizado apenas algumas vezes. Mais tarde, recorre-se a funções derivadas já conhecidas ou procura-se as derivadas de funções menos comuns em tabelas (por ex. no Bronstein-Semendjajew, ver também Tabela de derivadas e integrais) e calcula-se a derivada de funções compostas com a ajuda das regras de derivação.

Derivadas de funções elementares
Para o cálculo da função derivada de uma função elementar num determinado ponto , forma-se o quociente de diferenças correspondente, que é válido numa vizinhança com , e depois efetua-se a passagem ao limite .

Potências naturais
O caso já foi abordado mais acima. O quociente de diferenças correspondente resulta em

Se , pode-se simplificar cortando o ,

e a aproximação conduz a

Em geral, para um número natural com , utiliza-se o Teorema binomial:



Se for finito para todos os valores finitos de , também o é. O fator na última equação antes de leva a . Assim resulta




Dois complementos:
- Uma parcela constante em anula-se em , mesmo antes de se efetuar a passagem ao limite.
- Um fator constante em pode ser colocado em evidência em e movido para a frente da fração.



Função exponencial

Com a Função exponencial resulta o quociente de diferenças


Para todo vale


Desta forma, pode ser colocado em evidência no numerador.


Com a passagem ao limite derivada acima
resulta

Aqui, é o Logaritmo natural de . Em particular para o Número de Euler , tem-se . Daqui resulta a propriedade adicional distintiva:


Logaritmo
Com a função logarítmica na base resulta o quociente de diferenças





Para todo vale


Com a passagem ao limite derivada acima

e com a mudança de base resulta


Isto só existe para . Para existe a função .[35] Com a substituição e a Regra da cadeia, a sua derivada é




Ambas as derivadas podem ser combinadas para em


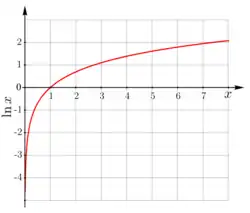
Especialmente para o logaritmo natural vale

Seno e cosseno
Com a função seno resulta o quociente de diferenças


Com a fórmula de prostaférese (transformação de soma em produto)

tem-se

Com a passagem ao limite derivada acima

e com resulta


Para a função cosseno, um cálculo análogo com

conduz a


Outras funções elementares
Com as derivadas anteriores, podem ser estabelecidas funções derivadas para outras funções. Para este fim, são necessárias também as regras de derivação para as operações aritméticas básicas, a Regra da cadeia e a Regra da função inversa.
Potências genéricas
A função foi até agora derivada apenas para como um número natural. A aplicabilidade da regra de derivação correspondente pode ser estendida para expoentes reais quando . Com a substituição[36]

tem-se

Se isto for diferenciado usando a regra da cadeia, obtém-se o resultado conhecido:

Uma aplicação é a derivada da função raiz. Para , vale com
![{\displaystyle f(x)={\sqrt[{m}]{x}}=x^{\frac {1}{m}}}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/d6cb473bb3eb4fc3708532fd9ecc490e04a2f264.svg)

![{\displaystyle f'(x)={\frac {1}{m}}{\frac {f}{x}}={\frac {1}{m}}\;{\frac {\sqrt[{m}]{x}}{x}}.}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/17d3630d048bade9d78586f3079b59cdea97b1ea.svg)
O caso diz respeito à Raiz quadrada:
Para vale


Tangente e cotangente
Com o auxílio da Regra do quociente e as funções derivadas do seno e cosseno, também se podem estabelecer as funções derivadas para a Tangente e a cotangente. Vale

Aqui, foi utilizada a fórmula conhecida como "Identidade trigonométrica fundamental" (ou Pitágoras trigonométrico) . Da mesma forma, obtém-se


Arco-seno e arco-cosseno
O Arco-seno e o arco-cosseno são definidos como as funções inversas do seno e cosseno. As derivadas são calculadas através da regra da função inversa. Se definirmos , então segue-se no intervalo



Para o arco-cosseno, resulta da mesma forma com


Arco-tangente e arco-cotangente
O Arco-tangente e o arco-cotangente são definidos como as funções inversas da tangente e cotangente. Definindo , segue-se através da regra da função inversa


Para o arco-cotangente, resulta de forma semelhante com


Função composta
Funções compostas podem ser estruturadas até que a regra de derivação elementar aplicável a cada elemento estrutural possa ser encontrada. Para isso, existem a Regra da soma, a Regra do produto, a Regra do quociente e a Regra da cadeia. Uma vez que estas são explicadas nos seus próprios artigos, apresenta-se aqui apenas um exemplo.
com é derivável em relação a como uma potência com é derivável em relação a como uma soma com uma constante com é derivável em relação a como uma função trigonométrica é derivável em relação a como uma potência com fator constante


















Pela regra da cadeia, obtém-se

Resumo
Aqui resumem-se as regras de derivação para funções elementares e compostas. Uma lista detalhada encontra-se em Tabela de derivadas e integrais.
| Observação | ||
|---|---|---|
| Elementar | ||
| o fator constante é mantido | ||
| a parcela constante desaparece | ||
| Função de potência | ||
| Função exponencial | ||
| Função logarítmica | ||
| Funções trigonométricas | ||
| Funções hiperbólicas | ||
| Regra da soma | ||
| Regra do fator constante | ||
| Regra do produto | ||
| Regra do quociente | ||
ou | Regra da cadeia com | |
| Regra da inversa com ou |















































![{\displaystyle u[v(x)]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/ecd0b3af2d9804a34ab0fd2dad5a66481163343d.svg)







Derivadas de ordem superior
Se a derivada de uma função for, por sua vez, diferenciável, a segunda derivada de pode ser definida como a derivada da primeira. Da mesma forma, podem ser definidas a terceira, a quarta, etc., derivadas. Em conformidade, uma função pode ser diferenciável uma vez, diferenciável duas vezes, etc.
Se a primeira derivada da posição (ou percurso) em relação ao tempo for a Velocidade, então a segunda derivada pode ser interpretada como a Aceleração e a terceira derivada como o arranque (ou solavanco).
As derivadas de ordem superior podem ser escritas de várias formas:

ou no caso físico (para uma derivada em relação ao tempo)

Para a designação formal de derivadas arbitrárias , também se estabelece e .


Operadores diferenciais de ordem superior
Se for um número natural e um conjunto aberto, então o espaço das funções vezes continuamente diferenciáveis em é designado por . O Operador diferencial induz assim uma cadeia de mapeamentos lineares




e, assim, em geral para :


Aqui designa o espaço das funções contínuas em . Como exemplo: Se um for derivado uma vez aplicando , o resultado só pode geralmente ser derivado mais vezes, e assim por diante. Cada espaço é uma -álgebra, uma vez que, de acordo com as regras da soma e do produto, as somas e também os produtos de funções vezes continuamente diferenciáveis são novamente funções vezes continuamente diferenciáveis. Adicionalmente, aplica-se a cadeia ascendente de inclusões próprias







pois, de forma evidente, toda a função que seja pelo menos vezes continuamente diferenciável também é vezes continuamente diferenciável, etc., mas as funções

mostram exemplos de funções de quando – o que é possível sem perda de generalidade – se assume .[37]


Regras para derivadas de ordem superior
- Regra de Leibniz
A derivada de ordem para um produto de duas funções e diferenciáveis vezes resulta de

- .

As expressões da forma que ocorrem aqui são coeficientes binomiais. A fórmula é uma generalização da regra do produto.

- Fórmula de Faà di Bruno
Esta fórmula permite a representação fechada da -ésima derivada da composição de duas funções diferenciáveis vezes. Ela generaliza a regra da cadeia para derivadas de ordem superior.
Fórmulas de Taylor com resto
Se for uma função vezes continuamente diferenciável num intervalo , então a chamada fórmula de Taylor aplica-se a todo o e de :



com o -ésimo polinómio de Taylor no ponto de desenvolvimento

e o -ésimo resto

com um .[38] Uma função infinitamente diferenciável é chamada de função suave. Como possui todas as derivadas, a fórmula de Taylor acima pode ser expandida para a Série de Taylor de com o ponto de desenvolvimento :


No entanto, nem todas as funções suaves podem ser representadas pela sua série de Taylor, ver abaixo.
Funções suaves
Funções que são infinitamente diferenciáveis em cada ponto do seu domínio de definição são também designadas por funções suaves. O conjunto de todas as funções suaves num conjunto aberto é habitualmente denotado por . Ele tem a estrutura de uma -álgebra (múltiplos escalares, somas e produtos de funções suaves também são funções suaves) e é dado por


onde denota todas as funções que são vezes continuamente diferenciáveis em .[28] Na análise matemática encontra-se frequentemente o termo suficientemente suave. O que isto significa é que a função é diferenciável pelo menos tantas vezes quantas as necessárias para levar a cabo a linha de raciocínio em questão.
Funções analíticas
O conceito acima de suavidade pode ser ainda mais refinado. Uma função diz-se analítica real se puder ser expandida localmente numa série de Taylor em cada ponto, ou seja,

para todo o e para todos os valores suficientemente pequenos de . As funções analíticas têm propriedades fortes e recebem especial atenção na análise complexa. Deste modo, aí não são estudadas funções reais, mas sim funções analíticas complexas. O seu conjunto é normalmente designado por e aplica-se . De notar em particular que qualquer função analítica é suave, mas não o inverso. A existência de todas as derivadas não é, portanto, suficiente para garantir que a série de Taylor represente a função, como mostra o seguinte contraexemplo





de uma função suave não analítica.[39] Todas as derivadas reais desta função anulam-se no 0, mas não se trata da função zero. Consequentemente, não é representada no ponto 0 pela sua série de Taylor.
Aplicações
Uma aplicação importante do cálculo diferencial a uma variável é a determinação de valores extremos, principalmente para a otimização de processos, como no contexto de custos, material ou consumo de energia.[40] O cálculo diferencial fornece um método para encontrar os pontos extremos sem ter de efetuar uma busca numérica trabalhosa. Este tira partido do facto de que num ponto de extremo local a primeira derivada da função deve necessariamente ser igual a 0. Portanto, deve aplicar-se se for um ponto de extremo local. Inversamente, porém, ainda não significa que seja um máximo ou um mínimo. Neste caso, são necessárias mais informações para poder tomar uma decisão inequívoca, o que geralmente é possível observando as derivadas superiores em .


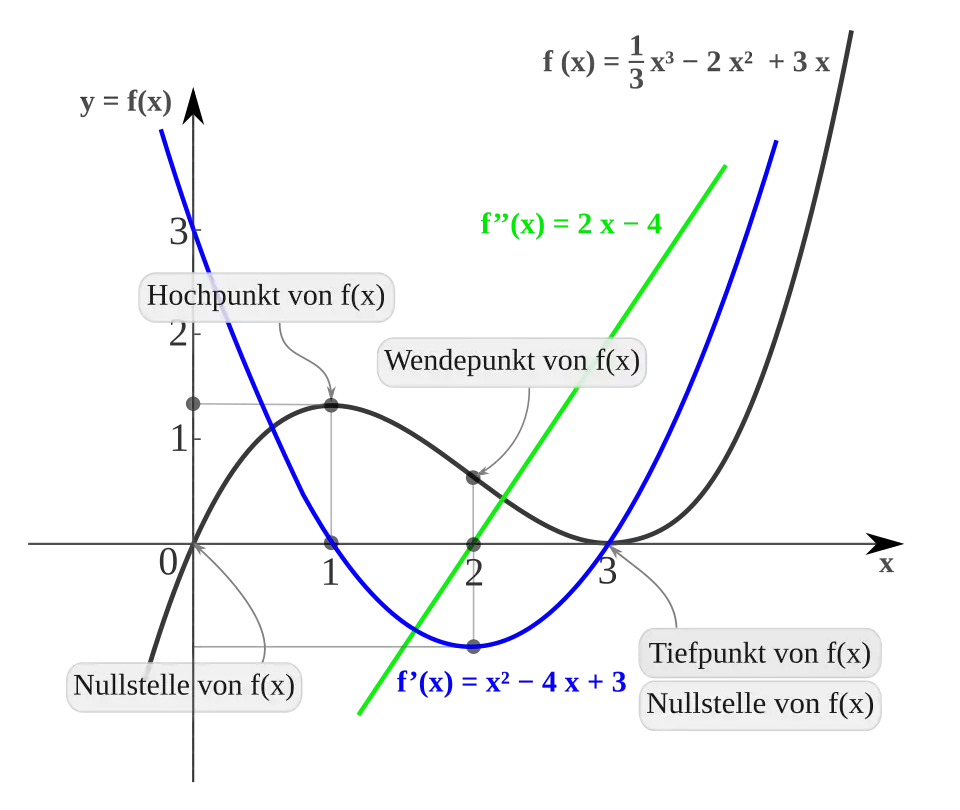
Uma função pode ter um valor máximo ou mínimo sem que a derivada exista neste ponto; no entanto, neste caso, o cálculo diferencial não pode ser utilizado. Consequentemente, a seguir, consideram-se apenas funções que sejam pelo menos localmente diferenciáveis. Como exemplo, tomamos a função polinomial com o termo da função

A figura ilustra o traçado dos gráficos de , e .
Tangentes horizontais
Se uma função com tiver o seu valor máximo num ponto , ou seja, se for aplicável a todos os deste intervalo, e se for diferenciável no ponto , então a derivada nesse ponto só pode ser igual a zero: . Uma afirmação semelhante aplica-se se assumir o seu valor mínimo em .




A interpretação geométrica deste Teorema de Fermat é a de que o gráfico da função em pontos extremos locais tem uma tangente paralela ao eixo , também chamada de tangente horizontal.
Por conseguinte, no que diz respeito a funções diferenciáveis, uma condição necessária para a existência de um ponto extremo é que a derivada assuma o valor 0 nesse ponto:

Contudo, inversamente, o fato de a derivada ter o valor zero num ponto não implica que se possa concluir a existência de um ponto extremo; por exemplo, pode tratar-se de um Ponto de sela. Uma lista de vários critérios suficientes, cujo cumprimento permite concluir indubitavelmente a existência de um ponto extremo, encontra-se no artigo Ponto Extremo. Estes critérios utilizam frequentemente a segunda derivada ou derivadas de ordem ainda mais elevada.
Condição no exemplo
No exemplo temos

Daqui deduz-se que se aplica exatamente para e . Os valores da função nestes pontos são e , ou seja, a curva tem tangentes horizontais nos pontos e , e apenas nestes.






Como a sequência

é constituída alternadamente por valores pequenos e grandes, deve haver um ponto de máximo e um ponto de mínimo nesta área. Segundo o teorema de Fermat, a curva tem uma tangente horizontal nestes pontos, logo, os únicos pontos em questão são os determinados acima: Por conseguinte, é um ponto de máximo e é um ponto de mínimo.
Estudo de função
Recorrendo às derivadas, é possível analisar outras propriedades da função, tais como a existência de pontos de inflexão e pontos de sela, a convexidade ou a monotonia já referida acima. O desempenho destas análises constitui o objeto do estudo de uma função.
Manipulação de expressões algébricas
Além da determinação do declive de funções, o cálculo diferencial é, através do seu cálculo, uma ferramenta essencial na manipulação de expressões algébricas. Neste âmbito, desligamo-nos de qualquer conexão com o significado original da derivada enquanto declive. Se reconhecermos que duas expressões são iguais, a derivação pode ser utilizada para obter outras identidades (procuradas). Um exemplo serve para o ilustrar:
A partir da soma parcial já conhecida

da Série geométrica, deve calcular-se a soma
- .

Isto é alcançado através da diferenciação utilizando a Regra do quociente:

Como alternativa, a identidade também pode ser alcançada através da multiplicação seguida de um triplo telescopamento, algo que, no entanto, não é tão fácil de vislumbrar.
Teoremas centrais do cálculo diferencial de uma variável
Teorema fundamental do cálculo
A principal contribuição de Leibniz foi a constatação de que a integração e a derivação estão relacionadas. Ele formulou isto no teorema principal do cálculo diferencial e integral, também chamado de Teorema Fundamental do Cálculo, que afirma:
Se for um intervalo, uma função contínua e um número arbitrário contido em , então a função




é continuamente diferenciável, e a sua derivada é igual a .

Isto fornece, assim, um guia para a integração: Procura-se uma função , cuja derivada seja o integrando . Então vale:[41]

Teorema do valor médio do cálculo diferencial
Outro teorema central do cálculo diferencial é o Teorema do valor médio, que foi provado em 1821 por Cauchy.[42]
Seja uma função definida e contínua no intervalo fechado (com ). Além disso, seja a função diferenciável no intervalo aberto . Sob estas condições, existe pelo menos um , tal que
![{\displaystyle f\colon [a,b]\to \mathbb {R} }](./_assets_/eb734a37dd21ce173a46342d1cc64c92/c5ab61178bf5349838758ffe3d96135406ed0245.svg)
![{\displaystyle [a,b]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/9c4b788fc5c637e26ee98b45f89a5c08c85f7935.svg)



é válido – de um ponto de vista geométrico-intuitivo: Entre dois pontos de interseção de uma reta secante, existe na curva um ponto com uma reta tangente paralela à secante.[43]
Monotonia e diferenciabilidade
Se e for uma função diferenciável com para todo , então aplicam-se as seguintes afirmações:[44]


- A função é estritamente monótona.
- Tem-se com quaisquer .
- A função inversa existe, é diferenciável e satisfaz .




A partir disto, pode deduzir-se que uma função continuamente diferenciável , cuja derivada nunca se anula, já define um Difeomorfismo entre os intervalos e . Em múltiplas variáveis, a afirmação análoga é falsa. Assim, a derivada da função exponencial complexa , a saber, ela própria, não se anula em nenhum ponto, mas não se trata de uma aplicação injetiva (global) . Note-se que esta pode ser entendida como uma função real de dimensão superior , uma vez que é um Espaço vetorial sobre bidimensional.






No entanto, o Teorema de Hadamard fornece um critério com o qual se pode provar, em alguns casos, que uma função continuamente diferenciável é um Homeomorfismo.

A regra de l'Hôpital
Como aplicação do Teorema do valor médio, pode deduzir-se uma relação que, em alguns casos, permite calcular expressões indeterminadas da forma ou .[45]

Sejam diferenciáveis e não tenha nenhum zero. Suponha-se também que ou


ou
- .

Então vale

sob a condição de que o último limite exista em .

Cálculo diferencial em sequências de funções e integrais
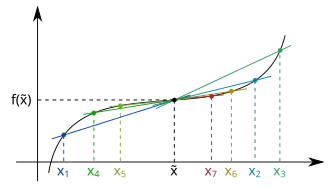
Em muitas aplicações analíticas, não se lida apenas com uma função , mas sim com uma sequência de funções . Neste contexto, é necessário esclarecer até que ponto o operador de derivação é compatível (isto é, pode ser comutado) com processos como limites, somas ou integrais.

Funções limite
Numa sequência de funções convergente e diferenciável , em geral não é possível tirar conclusões sobre o limite da sequência das derivadas , nem mesmo se convirja uniformemente. A afirmação análoga no cálculo integral, por outro lado, é verdadeira: na presença de convergência uniforme, o limite e a integral podem ser comutados, pelo menos se a função limite for "bem comportada".

A partir deste facto, pode pelo menos concluir-se o seguinte: Seja uma sequência de funções continuamente diferenciáveis, tal que a sequência das derivadas convirja uniformemente para uma função . Suponha-se também que a sequência convirja para pelo menos um ponto . Então converge uniformemente para uma função diferenciável e tem-se .[46]
![{\displaystyle f_{n}\colon [a,b]\to \mathbb {R} }](./_assets_/eb734a37dd21ce173a46342d1cc64c92/b32ac944f464748dfb697057d3788497bfabb6fe.svg)
![{\displaystyle f_{n}'\colon [a,b]\to \mathbb {R} }](./_assets_/eb734a37dd21ce173a46342d1cc64c92/fa20a73b34f9d8b5ab0dd50731c0f34dcabbb59f.svg)
![{\displaystyle g\colon [a,b]\to \mathbb {R} }](./_assets_/eb734a37dd21ce173a46342d1cc64c92/38132af5ea7cd916293fe93f29187bd461a5e270.svg)

![{\displaystyle x_{0}\in [a,b]}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/06636653315ee7c3b5dc9bdb6ac3fb8cccadc145.svg)

Comutação com séries infinitas
Seja uma sequência de funções continuamente diferenciáveis, tal que a série convirja, onde denota a Norma do supremo. Se além disso a série convergir para um , então a série de funções converge uniformemente para uma função diferenciável, e tem-se[47]

![{\displaystyle ||f_{n}'||_{\infty }:=\sup _{x\in [a,b]}|f_{n}'(x)|}](./_assets_/eb734a37dd21ce173a46342d1cc64c92/c15371c13ae76eca92cdd6495b526d331581d44c.svg)



O resultado remonta a Karl Weierstrass.[48]
Comutação com integração
Seja uma função contínua, tal que a derivada parcial
![{\displaystyle f\colon [a,b]\times [c,d]\to \mathbb {R} }](./_assets_/eb734a37dd21ce173a46342d1cc64c92/7d985fd7a6c6afcc39f2bfa732015f9c55ebf223.svg)

exista e seja contínua. Então, a função

também é diferenciável, e aplica-se a igualdade

Esta regra é também conhecida como a regra de Leibniz.[49]
Cálculo diferencial sobre os números complexos
Até agora, falou-se apenas de funções reais. No entanto, todas as regras abordadas podem ser transpostas para funções com entradas e valores complexos. O motivo para tal é que os números complexos formam um corpo, tal como os números reais, logo a adição, a multiplicação e a divisão estão aí definidas. Esta estrutura adicional constitui a diferença decisiva em relação a uma abordagem de derivadas reais multidimensionais, em que é entendido apenas como um Espaço vetorial sobre bidimensional. Além disso, os conceitos de distância euclidiana dos números reais (ver também Espaço euclidiano) podem ser transferidos naturalmente para os números complexos. Isto permite uma definição e um tratamento análogos dos conceitos importantes para o cálculo diferencial, como sequência e limite.[50]
Assim, se for um conjunto aberto e uma função de valores complexos, então diz-se complexamente diferenciável no ponto se o limite




existir.[51] Este é denotado por e designado por derivada (complexa) de no ponto . É, portanto, possível alargar o conceito de linearização aos números complexos: a derivada é a "inclinação" da função linear que otimamente aproxima em . Contudo, deve notar-se que o valor no limite pode assumir não apenas números reais, mas também números complexos (próximos de 0).

Isto tem como consequência que a noção de diferenciabilidade complexa seja substancialmente mais restritiva do que a de diferenciabilidade real. Enquanto nos reais apenas duas direções tinham de ser consideradas no quociente de diferenças, nos complexos existem infinitas direções, uma vez que estas não formam uma reta, mas sim um plano. Por exemplo, a função de valor absoluto não é complexamente diferenciável em parte alguma. Uma função complexa é complexamente diferenciável num ponto se e só se satisfizer nesse ponto as Equações de Cauchy-Riemann e for totalmente diferenciável.[52]

Apesar de (ou precisamente devido a) o conceito muito mais restritivo da diferenciabilidade complexa, todas as regras de cálculo habituais do cálculo diferencial real transferem-se para o cálculo diferencial complexo. Isto inclui as regras de derivação, por exemplo, a regra da soma, a regra do produto e a regra da cadeia, bem como a regra da inversa para funções inversas. Muitas funções, como as potências, a função exponencial ou o logaritmo, têm extensões naturais para os números complexos e mantêm as suas propriedades características. Deste ponto de vista, o cálculo diferencial complexo é idêntico ao seu análogo real.
Quando uma função é complexamente diferenciável em todo o , é também designada por uma Função holomorfa em .[53] As funções holomorfas possuem propriedades importantes. Por exemplo, toda função holomorfa já é (em cada ponto) infinitamente diferenciável. A questão da classificação das funções holomorfas que daí advém é objeto de estudo da Análise complexa. Verifica-se que, no caso complexo unidimensional, o termo holomorfo é equivalente ao termo analítico. Desse modo, toda função holomorfa é analítica e vice-versa. Se uma função for inclusive holomorfa em todo o , ela é chamada de inteira. Exemplos de funções inteiras são as funções de potência com números naturais , bem como , e .




Cálculo diferencial de funções multidimensionais
Até agora, todas as considerações tiveram como premissa uma função de uma variável (ou seja, com um número real ou complexo como argumento). Funções que mapeiam vetores em vetores ou vetores em números podem igualmente ter uma derivada. Contudo, nesses casos, não existe apenas uma tangente exclusivamente definida no gráfico da função, visto que as direções multiplicam-se. Nisto faz-se necessária uma ampliação na compreensão do que se concebe como derivada até ao momento.
Diferenciabilidade multidimensional e a matriz jacobiana
Derivada direcional
Seja um conjunto aberto, uma função, e um vetor de direção. Como é aberto, existe tal que para todo . Assim, a função dada por está bem definida.








Se essa função for diferenciável em , então sua derivada nesse ponto recebe o nome de derivada direcional de em na direção , e é frequentemente denotada por .[54] Ela é dada por


A derivada direcional está relacionada com a matriz jacobiana. Se for diferenciável em , então existe e vale

em que representa a notação de Landau.[55]

Como exemplo, considere-se uma função que descreva um campo escalar, como uma distribuição de temperatura em um ambiente. A derivada direcional em um ponto indica a taxa de variação da temperatura quando se parte desse ponto em uma direção específica. Em termos físicos, ela mede quão rapidamente a temperatura aumenta ou diminui ao mover-se nessa direção.

Derivadas parciais
As derivadas direcionais nas direções dos vetores da base canônica , isto é, nas direções coordenadas de , chamam-se derivadas parciais.


Assim, para uma função de variáveis, obtêm-se derivadas parciais, uma para cada variável.[56] Elas são definidas por

No caso de funções reais, isto é, , as derivadas parciais podem ser reunidas no gradiente, também denotado por nabla:[57]


Conforme a convenção adotada, o gradiente pode ser representado como vetor linha ou vetor coluna. Em muitos contextos, especialmente na física e na álgebra linear, é comum representá-lo como vetor coluna.
As próprias derivadas parciais também podem ser diferenciadas. Quando existem as derivadas parciais de segunda ordem, elas podem ser organizadas na matriz hessiana, que desempenha papel importante no estudo da curvatura local da função e na análise de máximos e mínimos.
Diferenciabilidade total
Seja uma função, em que é um conjunto aberto. Diz-se que é totalmente diferenciável em um ponto — ou simplesmente diferenciável, também chamada por vezes de diferenciável no sentido de Fréchet[54] — se existir uma aplicação linear tal que



Em outras palavras, é diferenciável em quando pode ser aproximada, nas proximidades desse ponto, por uma aplicação linear. No caso unidimensional, essa definição coincide com a noção usual de derivada.[58]
Se tal aplicação linear existe, então ela é única. Além disso, essa definição não depende da escolha da norma, desde que se usem normas equivalentes. A diferenciabilidade total expressa, assim, a ideia de linearização local da função em torno de .
A representação matricial dessa aplicação linear é dada pela matriz jacobiana de em , que é uma matriz de dimensão . No caso particular em que , essa matriz jacobiana corresponde, a menos de transposição, ao gradiente da função.


Há uma relação estreita entre a diferenciabilidade total e as derivadas parciais. Se é diferenciável em , então todas as derivadas parciais de existem nesse ponto, e os coeficientes da aplicação linear são precisamente essas derivadas. Assim,

A recíproca, porém, não vale em geral: a existência de derivadas parciais em não implica, por si só, que a função seja diferenciável nesse ponto. Por outro lado, se as derivadas parciais existem em uma vizinhança de e são contínuas em — em particular, se são contínuas numa vizinhança de —, então é diferenciável em .[59]
Regras de cálculo do cálculo diferencial multidimensional
Regra da cadeia
Sejam e abertos, bem como e diferenciáveis em e , respetivamente, onde . Então com é diferenciável em com a matriz jacobiana







Por outras palavras, a matriz jacobiana da composição é o produto das matrizes jacobianas de e .[60] Importa notar que, ao contrário do caso clássico unidimensional, a ordem dos fatores tem um papel importante.

Regra do produto
Com o auxílio da regra da cadeia, a regra do produto pode ser generalizada para funções de valor real com um domínio de dimensão superior.[61] Se for aberto e se forem ambas diferenciáveis em , segue-se


ou na notação de gradiente

Sequências de funções
Seja aberto. Denote-se por uma sequência de funções continuamente diferenciáveis , tal que existam funções e (sendo o espaço dos mapeamentos lineares de para ) tais que:





- converge pontualmente para ,
- converge localmente uniformemente para .


Então é continuamente diferenciável em e tem-se .[62]

Derivação implícita
Se uma função for dada por uma equação implícita , segue-se da regra da cadeia multidimensional, a qual é válida para funções de várias variáveis, que



Para a derivada da função obtém-se, portanto,

com e


Teoremas centrais do cálculo diferencial de várias variáveis
Teorema de Schwarz
A ordem de derivação é irrelevante no cálculo de derivadas parciais de ordem superior se todas as derivadas parciais até e incluindo essa ordem forem contínuas. Em termos concretos, isto significa que: Se for aberto e a função for duas vezes continuamente diferenciável (ou seja, se todas as segundas derivadas parciais existirem e forem contínuas), então, para todo e , vale:



O teorema torna-se falso se for omitida a exigência de continuidade das segundas derivadas parciais.[63]
Teorema da função implícita
O teorema da função implícita estabelece que as equações funcionais são resolvíveis se a Matriz jacobiana for localmente invertível em relação a determinadas variáveis.[64]
Teorema do valor médio
A partir do teorema do valor médio em várias variáveis, é possível obter estimativas para a variação de uma função ao longo do segmento que liga dois pontos. Seja um conjunto aberto e uma função diferenciável. Suponha-se que sejam tais que o segmento


esteja contido em . Então vale a desigualdade[65]

Essa desigualdade mostra que a diferença entre os valores de em dois pontos pode ser estimada em termos da norma da matriz jacobiana ao longo do segmento que os une.
Existe também uma formulação mais precisa no caso de funções reais de várias variáveis, isto é, funções . Para esse caso, ver também teorema do valor médio para funções de várias variáveis.
Derivadas de ordem superior em múltiplas dimensões
No caso das funções multidimensionais, também podem ser consideradas derivadas de ordem superior. Os conceitos apresentam, contudo, algumas diferenças substanciais em comparação com o caso clássico, as quais se tornam particularmente evidentes no caso de funções com várias variáveis. A própria matriz jacobiana já revela que a derivada de uma função multidimensional num ponto não assume mais a mesma forma que o valor da função nesse ponto. Se agora a primeira derivada for novamente derivada, a nova "matriz jacobiana" será, em geral, um objeto ainda mais abrangente. Para a sua descrição é necessário recorrer ao conceito de mapeamentos multilineares ou ao uso de tensores. Sendo , então atribui a cada ponto uma matriz de dimensões (aplicação linear de para ). Indutivamente, as derivadas de ordem superior são definidas como:





onde representa o espaço das aplicações -multilineares de para . De modo análogo ao que se passa no caso unidimensional, definem-se os espaços das funções vezes continuamente diferenciáveis em por e as funções suaves por[66]





Os conceitos das fórmulas de Taylor e da série de Taylor também podem ser generalizados para o caso multidimensional, consultar Série de Taylor em várias variáveis.
Aplicações
Cálculo de erros
Um exemplo de aplicação do cálculo diferencial de várias variáveis diz respeito ao cálculo de erros, por exemplo, no contexto da Física experimental. Enquanto, no caso mais simples, a grandeza a ser determinada pode ser medida diretamente, na maioria das vezes ela resultará de uma relação funcional entre grandezas mais fáceis de medir. Tipicamente, cada medição tem uma certa incerteza, que se tenta quantificar indicando o erro de medição.[67]
Se, por exemplo, com designar o volume de um paralelepípedo retângulo, o resultado poderia ser determinado experimentalmente medindo-se individualmente o comprimento , a largura e a altura . Se ocorrerem os erros , e nestas medições, aplica-se o seguinte para o erro no cálculo do volume:









Em geral, se uma grandeza a medir depende funcionalmente de grandezas medidas individualmente através de e nas suas medições surgem os respetivos erros , o erro da grandeza calculada a partir delas será aproximadamente


- .

Neste caso, o vetor denota os termos exatos das medições individuais.[67]

Aproximação de soluções de sistemas de equações
Muitos sistemas de equações de grau superior não podem ser resolvidos de forma algébrica fechada. Contudo, em alguns casos, é possível determinar pelo menos uma solução aproximada. Se o sistema for dado por , com uma função continuamente diferenciável , então a regra de iteração



converge para uma raiz (ou zero) sob certas condições. Aqui, denota a inversa da matriz jacobiana de . O processo representa uma generalização do método de Newton clássico unidimensional. No entanto, o cálculo destas matrizes inversas em cada passo é dispendioso. Em alguns casos, aceitando uma deterioração da taxa de convergência, pode efetuar-se a modificação de usar em vez de , com a qual apenas uma matriz necessita de ser invertida.[68]


Problemas de valor extremo
Também para o estudo de funções do tipo , encontrar mínimos e máximos (coletivamente denominados extremos) é uma preocupação central. O cálculo diferencial multidimensional oferece formas de determiná-los, desde que a função em questão seja duas vezes continuamente diferenciável. De forma análoga ao caso unidimensional, a condição necessária para a existência de extremos determina que, no dado ponto , todas as derivadas parciais devem ser iguais a 0, logo



para todo . Este critério não é suficiente, mas serve para identificar esses pontos críticos como possíveis candidatos a extremos. Ao determinar a matriz hessiana, a segunda derivada, torna-se posteriormente possível estabelecer, em certos casos, qual a tipologia do ponto extremo.[69] Ao contrário do caso unidimensional, a diversidade de formas dos pontos críticos é maior. Por meio de uma transformação de eixos principais, ou seja, uma investigação detalhada dos valores próprios da forma quadrática dada por uma expansão de Taylor multidimensional no ponto considerado, os diferentes casos podem ser classificados.[70]

Otimização com restrições
Frequentemente, em problemas de otimização, a função objetivo apenas precisa de ser minimizada num Subconjunto , onde é determinado por chamadas restrições ou condições de contorno. Um método que pode ser utilizado para resolver tais problemas é a regra dos multiplicadores de Lagrange.[71] Esta utiliza o cálculo diferencial multidimensional e pode até ser expandida para restrições de desigualdade.[72]


Exemplo da microeconomia
Na Microeconomia, por exemplo, são analisados diferentes tipos de funções de produção a fim de obter perspetivas para correlações macroeconómicas. Aqui, é de particular interesse o comportamento típico de uma função de produção: Como reage a variável dependente output (p. ex., o output de uma economia) quando os fatores de produção (inputs, aqui: trabalho e capital) são aumentados numa unidade infinitesimalmente pequena?
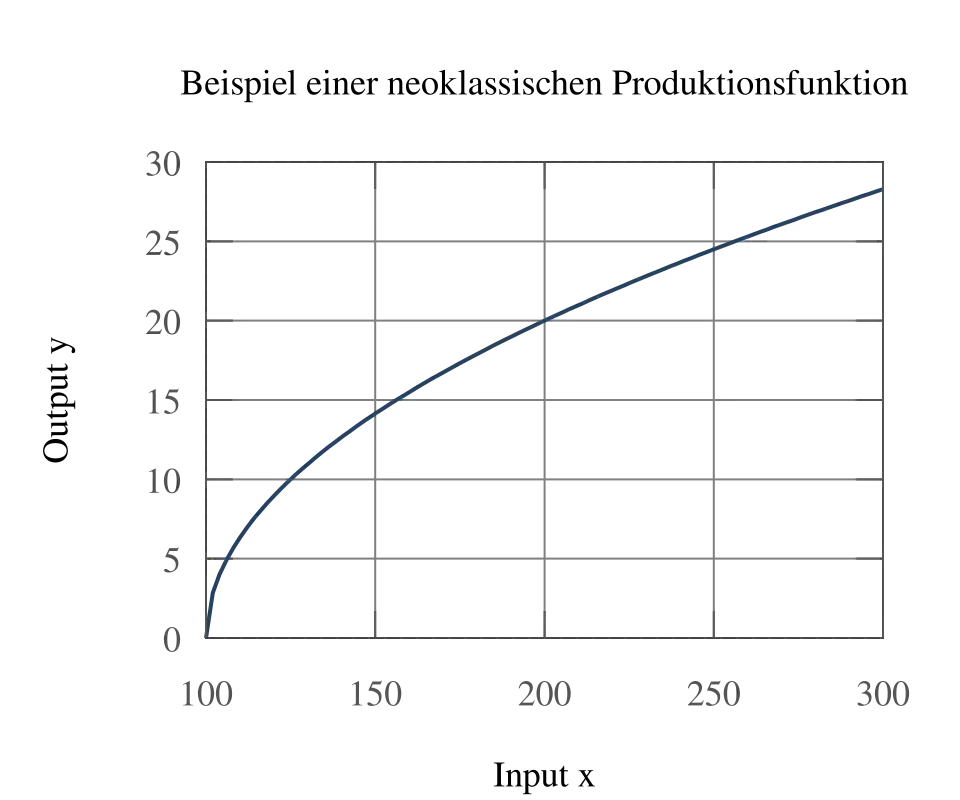
Um tipo básico de função de produção é a função de produção neoclássica. Ela caracteriza-se, entre outras coisas, pelo facto de o output aumentar com cada input adicional, mas as taxas de crescimento serem decrescentes. Suponha-se, por exemplo, que a função Cobb-Douglas
- com


seja determinante para uma economia. A qualquer momento, o output é produzido na economia com recurso aos fatores de produção trabalho e capital através de um dado nível de tecnologia . A primeira derivada desta função em relação aos fatores de produção resulta em:



- .

Visto que as derivadas parciais só podem assumir valores positivos devido à restrição , observa-se que o output aumenta mediante um incremento dos respetivos fatores de input. As derivadas parciais de 2.ª ordem resultam em:

- .

Elas serão negativas para todos os inputs, de modo que as taxas de crescimento caem. Poder-se-ia dizer, portanto, que com o aumento do input, o output cresce de forma subproporcional. A alteração relativa do output em relação a uma alteração relativa do input é aqui dada pela elasticidade . No presente caso, denota a elasticidade de produção do capital, que nesta função de produção corresponde ao expoente , que por sua vez representa a cota de rendimento do capital. Consequentemente, o output cresce pela cota de rendimento do capital no caso de um aumento infinitesimalmente pequeno do capital.



Referências
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 316.
- ↑ Serge Lang: A First Course in Calculus. Quinta Edição. Springer, pp. 59–61.
- ↑ Fritz Wicke: Einführung in die Höhere Mathematik: unter besonderer Berücksichtigung der Bedürfnisse des Ingenieurs. Volume 1. Springer, 1927, página 103.
- ↑ Carl Spitz: Erster Cursus der Differential- und Integralrechnung. C. F. Winter’sche Verlagshandlung, 1871, página 15
- ↑ Carl Spitz: Erster Cursus der Differential- und Integralrechnung. C. F. Winter’sche Verlagshandlung, 1871, página 16
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 422.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 170.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 292.
- ↑ Serge Lang: A First Course in Calculus. Quinta Edição. Springer, pp. 463–464.
- ↑ John Stillwell: Mathematics and Its History, Terceira Edição, Springer, pp. 192–194.
- ↑ Serge Lang: Calculus of Several Variables, Terceira Edição, Springer, p. 439.
- ↑ Serge Lang: Calculus of Several Variables, Terceira Edição, Springer, p. 434.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 161.
- ↑ Serge Lang: Calculus of Several Variables, Terceira Edição, Springer, pp. 435–436.
- ↑ Hans Wußing, Heinz-Wilhelm Alten, Heiko Wesemüller-Kock, Eberhard Zeidler: 6000 Jahre Mathematik: Von den Anfängen bis Newton und Leibniz. Springer, 2008, p. 429.
- ↑ Thomas Sonar: 3000 Jahre Analysis, Springer, pp. 247–248.
- ↑ Thomas Sonar: 3000 Jahre Analysis, Springer, p. 378.
- ↑ Marquês de L’Hospital: Analyse des Infiniment Petits pour l’Intelligence des Lignes Courbes. Prefácio, pp. ix–x: « L’Étendue de ce calcul est immense: … »; ver no Archive.org.
- ↑ John Stillwell: Mathematics and its history, Terceira Edição, Springer, p. 157.
- ↑ Thomas Sonar: 3000 Jahre Analysis, Springer, pp. 424–425.
- ↑ Thomas Sonar: 3000 Jahre Analysis, Springer, pp. 506–514.
- ↑ Ernst Hairer, Gerhard Wanner: Analysis in historischer Entwicklung, Springer, p. 91.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 284.
- ↑ Bronstein et al.: Taschenbuch der Mathematik, Verlag Harri Deutsch, p. 394.
- 1 2 3 Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 318.
- ↑ Jeremy Gray: The Real and the Complex: A History of Analysis in the 19th Century, Springer, pp. 271–272.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 323.
- 1 2 Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 324.
- ↑ Guido Walz, ed. (2000). Differentialrechnung. Lexikon der Mathematik 1 ed. Mannheim/Heidelberg: Spektrum Akademischer Verlag. ISBN 3-8274-0439-8
- ↑ Ernst Hairer, Gerhard Wanner: Analysis in historischer Entwicklung, Springer, p. 90.
- ↑ Harro Heuser: Lehrbuch der Analysis. Teubner, Wiesbaden 2003, ISBN 3-519-62233-5, p. 269.
- ↑ Thomas Sonar: 3000 Jahre Analysis, Springer, p. 408.
- ↑ Lokenath Debnath: The Legacy of Leonhard Euler – A Tricentennial Tribute, Imperial College Press, p. 26.
- ↑ Ali Mason (1019). Advanced Differential Equations. [S.l.]: EDTECH. 67 páginas. ISBN 1-83947-389-4
- ↑ Karl Bosch: Mathematik für Wirtschaftswissenschaftler. 14. Auflage, Oldenbourg, 2003, p. 77
- ↑ Klaus Hefft: Mathematischer Vorkurs zum Studium der Physik. 2. Auflage. Springer, 2018, p. 97.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 329.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. p. 358.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, pp. 330–331.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 304.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, pp. 32–33.
- ↑ Ernst Hairer, Gerhard Wanner: Analysis in historischer Entwicklung, Springer, p. 248.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 335.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 336.
- ↑ Herbert Amann, Joachim Escher: Analysis 1. 3ª Edição. Birkhäuser, p. 346.
- ↑ Terence Tao: Analysis II, Terceira Edição, Hindustan Book Agency, p. 64.
- ↑ Terence Tao: Analysis II, Terceira Edição, Hindustan Book Agency, p. 65.
- ↑ Jeremy Gray: The Real and the Complex: A History of Analysis in the 19th Century, Springer, p. 201.
- ↑ Eberhard Freitag, Rolf Busam: Funktionentheorie 1, 4ª Edição, Springer, p. 89.
- ↑ Eberhard Freitag, Rolf Busam: Funktionentheorie 1, 4ª Edição, Springer, pp. 16 ff.
- ↑ Eberhard Freitag, Rolf Busam: Funktionentheorie 1, 4ª Edição, Springer, p. 35.
- ↑ Eberhard Freitag, Rolf Busam: Funktionentheorie 1, 4ª Edição, Springer, pp. 42–43.
- ↑ Eberhard Freitag, Rolf Busam: Funktionentheorie 1, 4ª Edição, Springer, p. 45.
- 1 2 Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, p. 157.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, p. 158.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, p. 159.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, p. 165.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, pp. 154–157.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, pp. 158–163.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 173.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 175.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 177.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 192.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, pp. 230–232.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª edição. Birkhäuser, p. 176.
- ↑ Herbert Amann, Joachim Escher: Analysis 2. 2ª Edição. Birkhäuser, p. 188.
- 1 2 T. Arens et al.: Mathematik. Spektrum, p. 794.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 803.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 811.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 812.
- ↑ T. Arens et al.: Mathematik. Spektrum, pp. 1193–1195.
- ↑ T. Arens et al.: Mathematik. Spektrum, p. 1196.