Navegação estimada
Em navegação, navegação por estimativa (do inglês: dead reckoning) é o processo de calcular a posição atual de um objeto em movimento usando uma posição previamente determinada, ou ponto fixo, e incorporando estimativas de velocidade, rumo (ou direção ou curso) e tempo decorrido. O termo correspondente em biologia, para descrever os processos pelos quais os animais atualizam suas estimativas de posição ou rumo, é integração de trajetória.
Os avanços em auxílios à navegação que fornecem informações precisas sobre a posição, em particular a navegação por satélite usando o Sistema de Posicionamento Global, tornaram a navegação por estimativa simples pelos humanos obsoleta para a maioria dos propósitos. No entanto, os sistemas de navegação inercial, que fornecem informações direcionais muito precisas, usam navegação por estimativa e são muito amplamente aplicados.
Etimologia
Ao contrário do mito, o termo "dead reckoning" não foi originalmente usado para abreviar "deduced reckoning" (cálculo deduzido), nem é um erro de ortografia do termo "ded reckoning". O uso de "ded" ou "deduced reckoning" não é conhecido por ter aparecido antes de 1931, muito mais tarde na história do que "dead reckoning", que apareceu já em 1613 de acordo com o Oxford English Dictionary. A intenção original de "dead" (morto) no termo é geralmente assumida como significando o uso de um objeto estacionário que está "morto na água" como base para os cálculos. Além disso, na época do primeiro aparecimento de "dead reckoning", "ded" era considerada uma grafia comum de "dead". Isso potencialmente levou à confusão posterior sobre a origem do termo.[1]
Por analogia com seu uso navegacional, as palavras dead reckoning também são usadas para significar o processo de estimar o valor de qualquer quantidade variável usando um valor anterior e adicionando quaisquer mudanças que tenham ocorrido nesse meio tempo. Frequentemente, esse uso implica que as mudanças não são conhecidas com precisão. O valor anterior e as mudanças podem ser quantidades medidas ou calculadas.[1]
Erros
Embora a navegação por estimativa possa fornecer as melhores informações disponíveis sobre a posição atual com pouca matemática ou análise, ela está sujeita a erros significativos de aproximação. Para informações posicionais precisas, tanto a velocidade quanto a direção devem ser conhecidas com precisão em todos os momentos durante a viagem. Mais notavelmente, a navegação por estimativa não considera a deriva direcional durante a viagem através de um meio fluido. Esses erros tendem a se compor ao longo de distâncias maiores, tornando a navegação por estimativa um método difícil de navegação para jornadas mais longas.[1]
Por exemplo, se o deslocamento é medido pelo número de rotações de uma roda, qualquer discrepância entre a distância real e assumida percorrida por rotação, devido talvez ao deslizamento ou irregularidades da superfície, será uma fonte de erro. Como cada estimativa de posição é relativa à anterior, os erros são cumulativos, ou compostos, ao longo do tempo.[1]
A precisão da navegação por estimativa pode ser aumentada significativamente usando outros métodos mais confiáveis para obter um novo ponto fixo no meio da jornada. Por exemplo, se alguém estivesse navegando em terra com pouca visibilidade, então a navegação por estimativa poderia ser usada para chegar perto o suficiente da posição conhecida de um marco de referência para poder vê-lo, antes de caminhar até o próprio marco — fornecendo um ponto de partida precisamente conhecido — e então partir novamente.[1]
Localização de nós sensores móveis
Localizar um nó sensor estático não é uma tarefa difícil porque anexar um dispositivo de Sistema de Posicionamento Global (GPS) satisfaz a necessidade de localização. Mas um nó sensor móvel, que muda continuamente sua localização geográfica com o tempo, é difícil de localizar. Principalmente nós sensores móveis dentro de algum domínio particular para coleta de dados podem ser usados, i.e., nó sensor anexado a um animal dentro de um campo de pastagem ou anexado a um soldado em um campo de batalha. Dentro desses cenários, um dispositivo GPS para cada nó sensor não pode ser viabilizado. Algumas das razões para isso incluem custo, tamanho e drenagem de bateria de nós sensores restritos.[2][3]
Para superar esse problema, um número limitado de nós de referência (com GPS) dentro de um campo é empregado. Esses nós transmitem continuamente suas localizações e outros nós nas proximidades recebem essas localizações e calculam sua posição usando alguma técnica matemática como trilateração. Para localização, pelo menos três localizações de referência conhecidas são necessárias para localizar. Vários algoritmos de localização baseados no método Monte Carlo Sequencial (SMC) foram propostos na literatura.[2][3]
Às vezes, um nó em alguns lugares recebe apenas duas localizações conhecidas e, portanto, torna-se impossível localizar. Para superar esse problema, a técnica de navegação por estimativa é usada. Com essa técnica, um nó sensor usa sua localização calculada anteriormente para localização em intervalos de tempo posteriores.[4] Por exemplo, no instante de tempo 1, se o nó A calcula sua posição como loca_1 com a ajuda de três localizações de referência conhecidas; então no instante de tempo 2 ele usa loca_1 junto com duas outras localizações de referência recebidas de outros dois nós de referência. Isso não apenas localiza um nó em menos tempo, mas também localiza em posições onde é difícil obter três localizações de referência.[5]
Navegação animal
Em estudos de navegação animal, a navegação por estimativa é mais comumente (embora não exclusivamente) conhecida como integração de trajetória. Os animais a usam para estimar sua localização atual com base em seus movimentos a partir de sua última localização conhecida. Animais como formigas, roedores e gansos demonstraram rastrear suas localizações continuamente em relação a um ponto de partida e retornar a ele, uma habilidade importante para forrageadores com uma casa fixa.[6][7]
Navegação veicular
Marítima

Na navegação marítima, um gráfico de navegação por estimativa geralmente não leva em consideração o efeito de correntes ou vento. A bordo de um navio, um gráfico de navegação por estimativa é considerado importante para avaliar informações de posição e planejar o movimento da embarcação.[8]
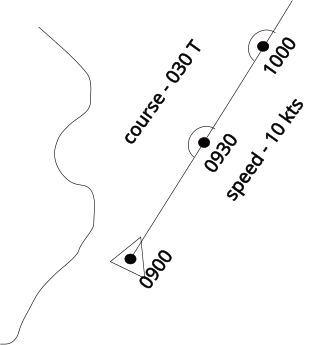
A navegação por estimativa começa com uma posição conhecida, ou ponto fixo, que é então avançada, matematicamente ou diretamente no gráfico, por meio de rumo, velocidade e tempo registrados. A velocidade pode ser determinada por muitos métodos. Antes da instrumentação moderna, era determinada a bordo usando um chip log. Métodos mais modernos incluem pit log referenciando a velocidade do motor (e.g. em rpm) contra uma tabela de deslocamento total (para navios) ou referenciando a velocidade aerodinâmica indicada alimentada pela pressão de um tubo de pitot. Esta medição é convertida em uma velocidade aerodinâmica equivalente com base nas condições atmosféricas conhecidas e erros medidos no sistema de velocidade aerodinâmica indicado. Um navio naval usa um dispositivo chamado pit sword (rodômetro), que usa dois sensores em uma haste de metal para medir a variação eletromagnética causada pelo navio se movendo através da água. Esta mudança é então convertida para a velocidade do navio. A distância é determinada multiplicando a velocidade e o tempo. Esta posição inicial pode então ser ajustada resultando em uma posição estimada levando em consideração a corrente (conhecida como set and drift na navegação marítima). Se não houver informação posicional disponível, um novo gráfico de navegação por estimativa pode começar de uma posição estimada. Neste caso, posições de navegação por estimativa subsequentes terão levado em conta o set e drift estimados.[8]
As posições de navegação por estimativa são calculadas em intervalos predeterminados e são mantidas entre pontos fixos. A duração do intervalo varia. Fatores incluindo a velocidade real feita e a natureza do rumo e outras mudanças de curso, e o julgamento do navegador determinam quando as posições de navegação por estimativa são calculadas.[8]
Antes do desenvolvimento do cronômetro marinho no século XVIII por John Harrison e do método de distância lunar, a navegação por estimativa era o método principal de determinação de longitude disponível para marinheiros como Cristóvão Colombo e John Cabot em suas viagens transatlânticas. Ferramentas como o traverse board foram desenvolvidas para permitir que até membros analfabetos da tripulação coletassem os dados necessários para a navegação por estimativa. A navegação polinésia, no entanto, usa diferentes técnicas de wayfinding.[8]
Aérea

Em 14 de junho de 1919, John Alcock e Arthur Brown decolaram de Lester's Field em St. John's, Newfoundland em um Vickers Vimy. Eles navegaram através do Oceano Atlântico por navegação por estimativa e pousaram em County Galway, Irlanda às 8h40 de 15 de junho completando o primeiro voo transatlântico sem escalas.[9]
Em 21 de maio de 1927, Charles Lindbergh pousou em Paris, França após um voo sem escalas bem-sucedido dos Estados Unidos no monomotor Spirit of St. Louis. Como a aeronave estava equipada com instrumentos muito básicos, Lindbergh usou navegação por estimativa para navegar.[9]
A navegação por estimativa no ar é semelhante à navegação por estimativa no mar, mas um pouco mais complicada. A densidade do ar através do qual a aeronave se move afeta seu desempenho, assim como ventos, peso e configurações de potência.[9]
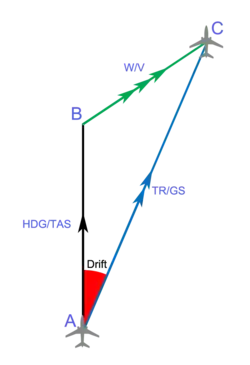
A fórmula básica para navegação por estimativa é Distância = Velocidade x Tempo. Uma aeronave voando a 250 nós de velocidade aerodinâmica por 2 horas voou 500 milhas náuticas através do ar. O triângulo do vento é usado para calcular os efeitos do vento no rumo e na velocidade aerodinâmica para obter um rumo magnético a seguir e a velocidade sobre o solo (velocidade em relação ao solo). Tabelas impressas, fórmulas ou um computador de voo E6B são usados para calcular os efeitos da densidade do ar na taxa de subida da aeronave, taxa de queima de combustível e velocidade aerodinâmica.[9]
Uma linha de curso é desenhada na carta aeronáutica junto com posições estimadas em intervalos fixos (digamos a cada meia hora). Observações visuais de características do solo são usadas para obter pontos fixos. Ao comparar o ponto fixo e a posição estimada, correções são feitas no rumo e na velocidade em relação ao solo da aeronave.[9]
A navegação por estimativa está no currículo para pilotos VFR (regras de voo visual - ou nível básico) em todo o mundo.[10] É ensinada independentemente de a aeronave ter auxílios à navegação como GPS, ADF e VOR e é um requisito da ICAO. Muitas escolas de treinamento de voo impedirão um aluno de usar auxílios eletrônicos até que eles dominem a navegação por estimativa.[9]
Os sistemas de navegação inercial (INSes), que são quase universais em aeronaves mais avançadas, usam navegação por estimativa internamente. O INS fornece capacidade de navegação confiável sob praticamente quaisquer condições, sem a necessidade de referências de navegação externas, embora ainda seja propenso a erros leves.[9]
Automotiva
Os primeiros sistemas de navegação automotivos precederam a disponibilidade de GPS e confiaram em sistemas baseados em navegação por estimativa. O Electro Gyrocator da Honda, lançado em 1981, foi o primeiro sistema de navegação de carro comercialmente disponível. Ele usava sistemas de navegação inercial, que rastreavam a distância percorrida, o ponto de partida e a direção seguida.[11]
A navegação por estimativa é hoje implementada em alguns sistemas de navegação automotivos de alta qualidade para superar as limitações da tecnologia GPS/GNSS sozinha. Os sinais de micro-ondas de satélite não estão disponíveis em garagens de estacionamento e túneis, e frequentemente severamente degradados em cânions urbanos e perto de árvores devido a linhas de visão bloqueadas para os satélites ou propagação de múltiplos caminhos. Em um sistema de navegação por navegação por estimativa, o carro é equipado com sensores que conhecem a circunferência da roda e registram rotações das rodas e direção da direção. Esses sensores geralmente já estão presentes em carros para outros propósitos (sistema de freios antiblocantes, controle eletrônico de estabilidade) e podem ser lidos pelo sistema de navegação do barramento de rede de área do controlador. O sistema de navegação então usa um filtro de Kalman para integrar os dados de sensor sempre disponíveis com as informações de posição precisas, mas ocasionalmente indisponíveis, dos dados de satélite em um ponto fixo de posição combinado.[11]
Navegação autônoma em robótica
A navegação por estimativa é utilizada em algumas aplicações robóticas.[12] Geralmente é usada para reduzir a necessidade de tecnologia de sensoriamento, como sensores ultrassônicos, GPS ou colocação de alguns codificadores lineares e rotativos, em um robô autônomo, reduzindo assim muito o custo e a complexidade à custa do desempenho e da repetibilidade. A utilização adequada da navegação por estimativa nesse sentido seria fornecer uma porcentagem conhecida de energia elétrica ou pressão hidráulica aos motores de acionamento do robô ao longo de uma determinada quantidade de tempo a partir de um ponto de partida geral. A navegação por estimativa não é totalmente precisa, o que pode levar a erros nas estimativas de distância variando de alguns milímetros (em usinagem CNC) a quilômetros (em UAVs), com base na duração da execução, na velocidade do robô, no comprimento da execução e em vários outros fatores.[12]
Navegação por estimativa de pedestres
Com a oferta de sensores aumentada em smartphones, acelerômetros integrados podem ser usados como um pedômetro e magnetômetro integrado como um fornecedor de rumo da bússola. A navegação por estimativa de pedestres (PDR) pode ser usada para complementar outros métodos de navegação de maneira semelhante à navegação automotiva, ou para estender a navegação para áreas onde outros sistemas de navegação não estão disponíveis.[13]
Em uma implementação simples, o usuário segura seu telefone na frente dele, e cada passo faz com que sua posição avance uma distância fixa na direção medida pela bússola. A precisão é limitada pela precisão do sensor, perturbações magnéticas dentro de estruturas e variáveis desconhecidas, como posição de transporte e comprimento do passo. Outro desafio é diferenciar caminhada de corrida e reconhecer movimentos como andar de bicicleta, subir escadas ou andar de elevador.[13]
Antes que os sistemas baseados em telefone existissem, muitos sistemas PDR personalizados existiam. Embora um pedômetro só possa ser usado para medir a distância linear percorrida, os sistemas PDR têm um magnetômetro incorporado para medição de rumo. Sistemas PDR personalizados podem assumir muitas formas, incluindo botas, cintos e relógios especiais, onde a variabilidade da posição de transporte foi minimizada para melhor utilizar o rumo do magnetômetro. A verdadeira navegação por estimativa é bastante complicada, pois não é apenas importante minimizar a deriva básica, mas também lidar com diferentes cenários de transporte e movimentos, bem como diferenças de hardware entre modelos de telefone.[14]
Navegação por estimativa direcional
A carruagem apontando para o sul era um dispositivo chinês antigo consistindo de um veículo puxado por cavalos de duas rodas que carregava um ponteiro que era destinado a sempre apontar para o sul, não importa como a carruagem virasse. A carruagem precedeu o uso navegacional da bússola magnética, e não podia detectar a direção que era sul. Em vez disso, usava um tipo de navegação por estimativa direcional: no início de uma jornada, o ponteiro era apontado para o sul manualmente, usando conhecimento local ou observações astronômicas, por exemplo, da Estrela Polar. Então, conforme viajava, um mecanismo possivelmente contendo engrenagens diferenciais usava as diferentes velocidades rotacionais das duas rodas para girar o ponteiro em relação ao corpo da carruagem pelo ângulo de curvas feitas (sujeito à precisão mecânica disponível), mantendo o ponteiro apontando em sua direção original, para o sul. Erros, como sempre com a navegação por estimativa, se acumulariam conforme a distância percorrida aumentasse.[14]
Para jogos em rede
Jogos em rede e ferramentas de simulação rotineiramente usam navegação por estimativa para prever onde um ator deve estar agora, usando seu último estado cinemático conhecido (posição, velocidade, aceleração, orientação e velocidade angular).[15] Isso é principalmente necessário porque é impraticável enviar atualizações de rede na taxa que a maioria dos jogos roda, 60 Hz. A solução básica começa projetando no futuro usando física linear:[16]

Esta fórmula é usada para mover o objeto até que uma nova atualização seja recebida pela rede. Nesse ponto, o problema é que agora existem dois estados cinemáticos: a posição atualmente estimada e a posição real recém-recebida. Resolver esses dois estados de uma maneira crível pode ser bastante complexo. Uma abordagem é criar uma curva (por exemplo, splines de Bézier cúbicos, splines Catmull-Rom centrípetas e curvas Hermite)[17] entre os dois estados enquanto ainda projeta no futuro. Outra técnica é usar mistura de velocidade projetiva, que é a mistura de duas projeções (última conhecida e atual) onde a projeção atual usa uma mistura entre a última velocidade conhecida e atual ao longo de um tempo definido.[15]




A primeira equação calcula uma velocidade mesclada dada a velocidade do lado do cliente no momento da última atualização do servidor e a última velocidade conhecida do lado do servidor . Isso essencialmente mescla da velocidade do lado do cliente em direção à velocidade do lado do servidor para uma transição suave. Observe que deve ir de zero (no momento da atualização do servidor) a um (no momento em que a próxima atualização deveria estar chegando). Uma atualização do servidor atrasada não é problemática, desde que permaneça em um.




Em seguida, duas posições são calculadas: primeiro, a velocidade mesclada e a última aceleração conhecida do lado do servidor são usadas para calcular . Esta é uma posição que é projetada da posição inicial do lado do cliente com base em , o tempo que passou desde a última atualização do servidor. Em segundo lugar, a mesma equação é usada com os últimos parâmetros conhecidos do lado do servidor para calcular a posição projetada da última posição conhecida do lado do servidor e velocidade , resultando em .






Finalmente, a nova posição a ser exibida no cliente é o resultado da interpolação da posição projetada com base nas informações do cliente em direção à posição projetada com base nas últimas informações conhecidas do servidor . O movimento resultante resolve suavemente a discrepância entre as informações do lado do cliente e do lado do servidor, mesmo que essas informações do lado do servidor cheguem de forma infrequente ou inconsistente. Também é livre de oscilações das quais a interpolação baseada em spline pode sofrer.

Ver também
Referências
- ↑ a b c d e Adams, Cecil (21 de novembro de 2002). «Is 'dead reckoning' short for 'deduced reckoning'?». straightdope.com. Consultado em 2 de fevereiro de 2018
- ↑ a b Hu, Lingxuan; Evans, David (1 de janeiro de 2004). «Localization for mobile sensor networks». Proceedings of the 10th annual international conference on Mobile computing and networking. Col: MobiCom '04. New York, NY, USA: ACM. pp. 45–57. CiteSeerX 10.1.1.645.3886
 . ISBN 978-1-58113-868-9. doi:10.1145/1023720.1023726
. ISBN 978-1-58113-868-9. doi:10.1145/1023720.1023726
- ↑ a b Monte Carlo Localization of Mobile Sensor Networks Using the Position Information of Neighbor Nodes. [S.l.]: Springer Berlin Heidelberg. 22 de setembro de 2009. pp. 270–283. ISBN 978-3-642-04382-6. doi:10.1007/978-3-642-04383-3_20
- ↑ Haroon Rashid, Ashok Kumar Turuk, 'Dead reckoning localisation technique for mobile wireless sensor networks', IET Wireless Sensor Systems, 2015, 5, (2), p. 87-96, DOI: 10.1049/iet-wss.2014.0043 IET Digital Library, http://digital-library.theiet.org/content/journals/10.1049/iet-wss.2014.0043
- ↑ Turuk, Haroon (2015). «IET Digital Library: Dead reckoning localisation technique for mobile wireless sensor networks». IET Wireless Sensor Systems. 5 (2): 87–96. arXiv:1504.06797. doi:10.1049/iet-wss.2014.0043
- ↑ Gallistel. The Organization of Learning. 1990.
- ↑ Dead reckoning (path integration) requires the hippocampal formation: evidence from spontaneous exploration and spatial learning tasks in light (allothetic) and dark (idiothetic) tests, IQ Whishaw, DJ Hines, DG Wallace, Behavioural Brain Research 127 (2001) 49 – 69
- ↑ a b c d «Archived copy» (PDF). Consultado em 17 de fevereiro de 2010. Cópia arquivada (PDF) em 13 de março de 2006
- ↑ a b c d e f g «Transport Canada TP13014E Sample Private Pilot Examination». Transport Canada. Consultado em 8 de outubro de 2013
- ↑ «ICAO Annex 1 Paragraph 2.3.4.2.1 h» (PDF). ICAO. Consultado em 18 de outubro de 2016. Cópia arquivada (PDF) em 14 de janeiro de 2017
- ↑ a b Cartographies of Travel and Navigation, James R. Akerman, p.279
- ↑ a b Howie M. Choset; Seth Hutchinson; Kevin M. Lynch; George Kantor; Wolfram Burgard; Lydia E. Kavraki; Sebastian Thrun (2005). Principles of Robot Motion: Theory, Algorithms, and Implementation. [S.l.]: MIT Press. pp. 285–. ISBN 978-0-262-03327-5
- ↑ a b Pedestrian Dead Reckoning (PDR) Simplified. GT Silicon. Consultado em 22 de janeiro de 2018. Cópia arquivada em 11 de dezembro de 2021
- ↑ a b Yu, N.; Zhan, X.; Zhao, S.; Wu, Y.; Feng, R. (fevereiro de 2018). «A Precise Dead Reckoning Algorithm Based on Bluetooth and Multiple Sensors». IEEE Internet of Things Journal. 5 (1): 336–351. Bibcode:2018IITJ....5..336Y. ISSN 2327-4662. doi:10.1109/JIOT.2017.2784386
- ↑ a b Murphy, Curtiss. Believable Dead Reckoning for Networked Games. Published in Game Engine Gems 2, Lengyel, Eric. AK Peters, 2011, p 308-326.
- ↑ Van Verth, James. Essential Mathematics for Games And Interactive Applications. Second Edition. Morgan Kaufmann, 1971, p. 580.
- ↑ Lengyel, Eric. Mathematics for 3D Game Programming And Computer Graphics. Second Edition. Charles River Media, 2004.